

Review of inverse synthetic aperture radar 3D imaging
-
摘要:
逆合成孔径雷达(inverse synthetic aperture radar,ISAR)可以对飞机、舰船与空间目标等进行成像,在军事和民事应用中具有重要的意义。ISAR三维成像可以克服传统二维成像中的几何失真、方位向定标难与图像投影平面未知等问题,有利于对目标进行分类和识别,是ISAR技术的重要发展趋势之一。本文主要对单天线ISAR、干涉ISAR(interferometric ISAR,InISAR)、阵列ISAR等不同体制的三维成像进行介绍。在此基础上,对各种体制的研究现状进行了总结,并对未来的发展方向进行了分析。
-
关键词:
- 逆合成孔径雷达(ISAR) /
- 三维成像 /
- 单天线雷达 /
- 干涉雷达 /
- 阵列雷达
Abstract:Inverse synthetic aperture radar (ISAR) can image moving targets such as aircrafts, ships, satellites and space debris, and is of great importance in military and civil applications. ISAR 3D imaging can overcome the problems of geometric distortion, difficult azimuthal calibration and unknown image projection plane in traditional 2D imaging, and is conducive to the classification and identification of targets, which is one of the important development trends of ISAR technology. This paper introduces the different systems of single-antenna ISAR, interferometric ISAR and array ISAR for 3D imaging. The current research status of various regimes is summarized and the future development direction is analyzed.
-
0 引 言
成像雷达的出现是雷达发展史上重要的里程碑[1]。它通过发射宽脉冲、大宽带信号,利用雷达与场景或目标之间的相对运动所引起的多普勒效应,结合先进的信号处理方法实现高分辨率的成像[2-3]。逆合成孔径雷达(inverse synthetic aperture radar, ISAR)是成像雷达的一个重要分支,其作用主要是对运动目标进行成像。ISAR可以全天时、全天候地对远距离的飞机、舰船、卫星和太空碎片等运动目标进行成像,在军事或民事的应用中都具有重要的意义[4-5]。
传统的ISAR成像处理技术可以获取目标高质量的二维图像,但存在着几何失真、方位向定标难与图像投影平面未知等问题,因此不能完全满足目标识别的需求。ISAR三维成像可以获取垂直于成像平面的高度维等信息,所获得的目标散射点三维结构图几何失真小,对目标的姿态变化不敏感,因此在目标分类和识别等领域具有广阔的应用前景[6-7]。按照成像体制的不同,目前的ISAR三维成像方法一般可分为三大类,分别为单天线ISAR三维成像、干涉ISAR(interferometric ISAR,InISAR)三维成像与阵列ISAR三维成像。
在单天线ISAR三维成像方面,可通过生成和差波束[8-11]、生成二维图像序列[12-20]、利用目标旋转运动特性[21-27]等方式实现目标的三维成像,根据成像原理的不同,分别适用于近距离运动目标、平稳运动目标与自旋运动目标的应用场景。单天线ISAR最大的优点是仅需一根雷达天线且系统结构相对简单,缺点主要是成像时间长、散射点重构误差大。将多天线的干涉技术应用到ISAR,即InISAR成像技术[28-30],能够实现对多种运动目标的应用场景进行成像。InISAR采用多天线同时对目标进行观测,并综合系统观测到的空间信息即可实现三维成像,具有结构简单、天线数量少、成像方法易实现等优势,缺点主要是无法对合成散射点进行有效的分离。在InISAR成像的过程中,研究者需要获取至少三幅高质量的ISAR图像,且需要保证它们之间具有较高的相关性,所涉及到的关键技术主要包括天线配置[31-37]、图像配准[38-49]、高质量ISAR图像的获取[50-52]、斜视处理[53-55]等。在InISAR技术发展的几十年来,研究者们为了更好地适应比较复杂的成像应用场景与追求更高质量的三维成像,发展了机载InISAR三维成像[56-58]、星载InISAR三维成像[59]、双/多基地InISAR三维成像[60-67]与太赫兹InISAR三维成像[68]等技术,极大程度推进了InISAR三维成像技术的发展。将ISAR成像技术与实孔径阵列雷达进行结合,可得到一种新的成像体制,即阵列ISAR三维成像技术[69],是InISAR成像体制的扩展。阵列ISAR采用空间谱估计的方法即可对目标实现三维成像,理论上具有更好的三维成像效果,也能够对多种运动目标的应用场景进行成像,缺点主要是天线结构比较复杂。由于阵列ISAR系统天线数量的限制,研究学者们将ISAR技术融入到了稀疏阵列[70-73]与多输入多输出(multiple-input multiple-output,MIMO)阵列[74-77]中,不仅降低了使用天线的数量,且提高了三维成像的质量。表1汇总了三类三维成像技术的成像特性、能像能力与应用条件。
表 1 三类ISAR三维成像技术的成像特性、成像能力以及应用条件Tab. 1 Characteristics, capability and application condition of 3 ISAR imaging teniques成像技术 成像特性 成像能力 应用条件 单天线ISAR三维成像 通过单根天线生成和差波束、生成二维图像序列、利用目标旋转运动特性等方式实现目标的三维成像 需要较长的观测时间;成像散射点重构误差大;成像应用场景比较有限 比较依赖于目标的运动方式 InISAR三维成像 采用多根天线同时对目标进行观测,通过系统观测到的空间信息实现目标的三维成像 观测时间短;成像效果较好,对目标的三维重构误差小,但无法分离合成散射点;能够对多个应用场景进行成像 各天线之间的距离不能太远且两条基线需保持互相垂直的状态 阵列ISAR三维成像 采用天线阵列对目标进行观测,并利用空间谱估计的方法实现目标的三维成像 观测时间短;成像效果最好;能够对多个应用场景进行成像 需要较多的天线阵元与空间资源 由于ISAR三维成像技术不再依赖传统的方位向多普勒分布形式,可以直接反映目标在空间中的三维结构,因此成为提高目标识别能力的一种极为有效的技术途径。但是,面对不同的成像体制与不同的成像场景所存在的各种成像问题,需要从不同的角度进行深入的研究和完善。本文从单天线ISAR、InISAR与阵列ISAR等不同体制的三维成像入手,介绍它们的成像机理、关键技术以及所适用的成像场景,并对它们的研究现状以及未来的发展方向进行总结与分析。
1 单天线ISAR三维成像
利用单根雷达天线对目标进行ISAR三维成像可以节省雷达系统的硬件成本,因此具有独特的优势。单天线ISAR三维成像方法主要分为三类:和差波束三维成像[8-11]、基于ISAR二维图像序列的三维成像[12-20]与基于目标旋转特性的ISAR三维成像[21-27]。下面分别总结上述三类方法的成像机理与研究现状。
1.1 和差波束三维成像
和差波束三维成像方法是对ISAR三维成像的初步探索,将ISAR技术与单脉冲测角技术相结合,综合了ISAR二维图像分辨率高和单脉冲雷达测角精度高的优点,在导弹制导等方面的应用中起着非常重要的作用[8]。对于点目标,单脉冲雷达在接收端有四个通道,能够形成水平、俯仰方向上的和通道、差通道信号,并利用和差通道的信号比对获得点目标偏离波束中心的角度,再结合距离信息,即可实现对点目标在空间中的三维定位与跟踪。本质上就是利用多通道回波信号之间的幅度差异求解点目标的位置。而对于具有多个散射点的目标,则需要ISAR技术的二维分辨能力,通过相干积累在多普勒域中分离各散射点,再结合单脉冲测角技术能够获取目标的三维图像[9-10]。虽然和差波束三维成像方法的原理较为简单,但对于远距离目标,在有限的测角精度下横向分辨能力较差,很难将相距较近的不同散射点分开[11],因此和差波束三维成像方法一般只适用于近距离的目标,其应用范围受到了限制。
1.2 基于ISAR二维图像序列的三维成像
计算机视觉等方面的研究表明,利用两个或多个角度不同的二维视图可以获取目标的三维图像。基于此思想,通过雷达系统对目标进行长时间的观测获得多个角度的ISAR二维图像,并从中重构出目标的三维图像是可行的[78],这类成像方法称为基于ISAR二维图像序列的三维成像。本质上是利用单天线捕获的时间信息实现目标的三维成像。按照成像原理的不同,可以通过光流场分析技术[12-14]、因式分解[15-18]、散射点能量投影[19]与深度神经网络(deep neural network,DNN)[20]等方法获取目标的三维图像,本部分主要对这四种成像方法进行综述。
1.2.1 基于光流场分析技术的ISAR三维成像
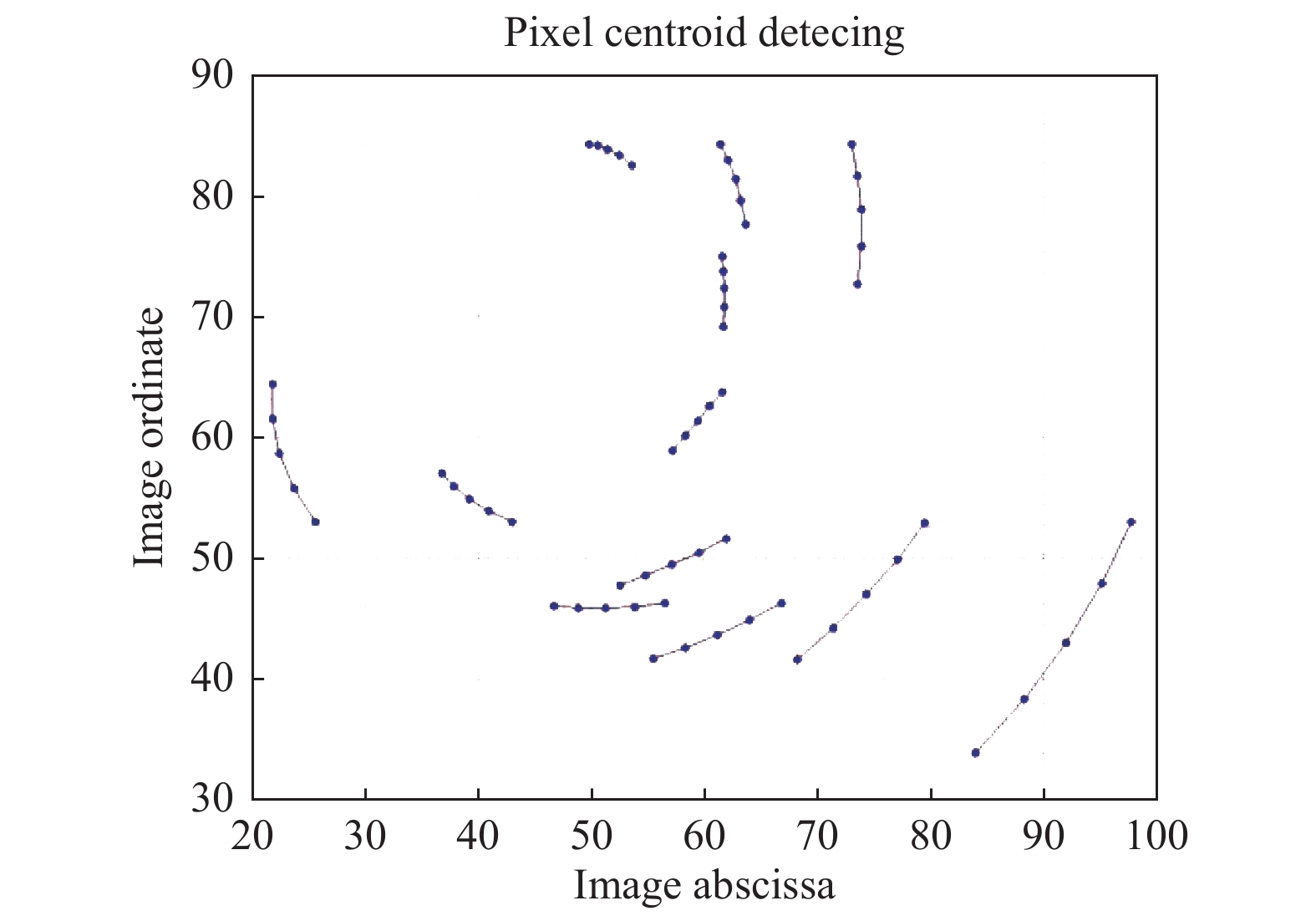
光流场是指图像中所有像素点构成的一种二维瞬时速度场,其中二维速度场是三维速度矢量在成像表面的投影。因此,光流不仅包含了目标的运动信息,而且还包含了目标丰富的三维结构信息[79]。如果目标的运动参数是已知的且各帧中相同散射点得到了正确的关联,根据光流场分析技术能够从ISAR图像序列中获得目标的三维图像[12]。文献[13]和文献[14]所提方法可以实现对ISAR图像序列中目标散射体中心的检测、跟踪与匹配。如图1所示,当目标姿态变化剧烈的情况下,仍可建立各散射体中心在帧间的对应关系和轨迹,保证了目标散射体中心在帧间的有效关联,进而确保了三维成像的有效进行。
![]()
1.2.2 基于因式分解的ISAR三维成像
Tomasi和Kanade[80]提出了一种基于因式分解的方法,用于从二维光学图像序列中获取目标的三维图像。在完成图像缩放的前提下,假设有F帧二维图像序列,每帧图像中都有P个目标像素点,从这F帧图像中提取目标像素点的坐标,可以得到一个2F×P维度的测量矩阵。该测量矩阵对应图像序列中目标像素点的二维投影方程,对其采用奇异值分解的方法可以获得散射点的三维位置矩阵。基于此,F.E.McFadden[15]首次将因式分解的方法应用于ISAR图像序列中,实现了目标三维特征的提取与识别。
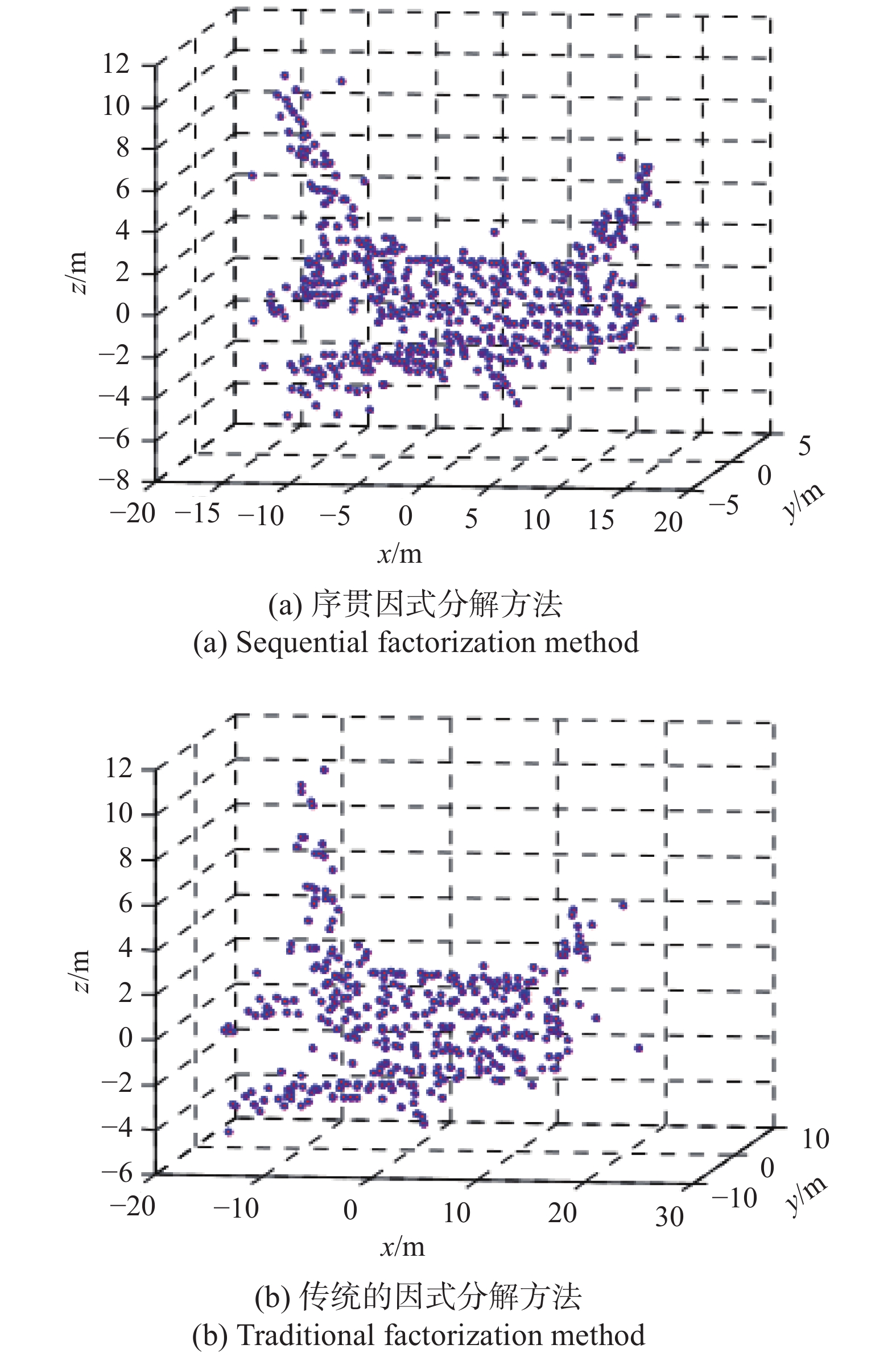
在提升三维成像的精度方面,需要对ISAR图像序列中的目标散射体中心进行匹配与关联[16]。而针对沿轨道运动的空间目标,可以根据目标沿椭圆轨道运动的特点对其ISAR图像序列的散射体中心进行约束,以达到更好地对图像序列中散射体中心进行匹配与关联的目的[17]。在提升三维成像的性能方面,可通过序贯因式分解法对ISAR图像序列中的两幅图像进行匹配与重构,然后将每次重构的结果进行融合获取最终的三维图像,比较适用于实际的应用场景[18]。图2是11帧ISAR图像序列的三维成像结果,能够看出序贯因式分解法能够凸显目标更多的三维特征。不过需要注意的是,序贯因式分解法是一个累加的过程,因此存在积累误差的问题。
相比于基于光流场分析技术的ISAR三维成像方法,基于因式分解的ISAR图像序列三维成像方法不需要提前了解目标的运动信息,针对非合作目标的探测应用更具有实际的价值。
1.2.3 基于散射点能量投影的ISAR三维成像
Liu Lei等人[19]提出了一种基于散射点能量投影的ISAR三维成像方法。首先,对每帧图像构造投影向量。其次,利用粒子群优化(particle swarm optimization,PSO)算法对三维散射体进行搜索,并完成ISAR二维图像序列中所有散射体能量的投影。最后,通过逆投影变换完成目标的三维成像。值得一提的是,该方法省略了散射体中心提取和图像序列关联等步骤,因此相对于光流场分析、因式分解两类方法具有一定的优势。不过该方法目前只适用于平稳运动的目标,对于非平稳运动特性的目标,还需要进一步的改进。
上述三种成像方法比较适合于对运动特性相对平稳或做规则运动的目标进行成像,例如民航飞机、卫星、空间站等目标。一方面,在成像的过程中,如果目标的姿态变化幅度很小,可能无法获取更多有关目标的三维特性,进而无法对目标进行准确的识别。另一方面,对于做剧烈运动或非规则运动的目标,目前存在的算法可能无法将其散射体中心进行有效的关联且积累误差大。在未来,是否可以根据目标的运动特性研究出一种适合剧烈运动目标的ISAR图像序列散射体中心匹配与关联的算法还需进一步的探索。
1.2.4 基于DNN的ISAR三维成像
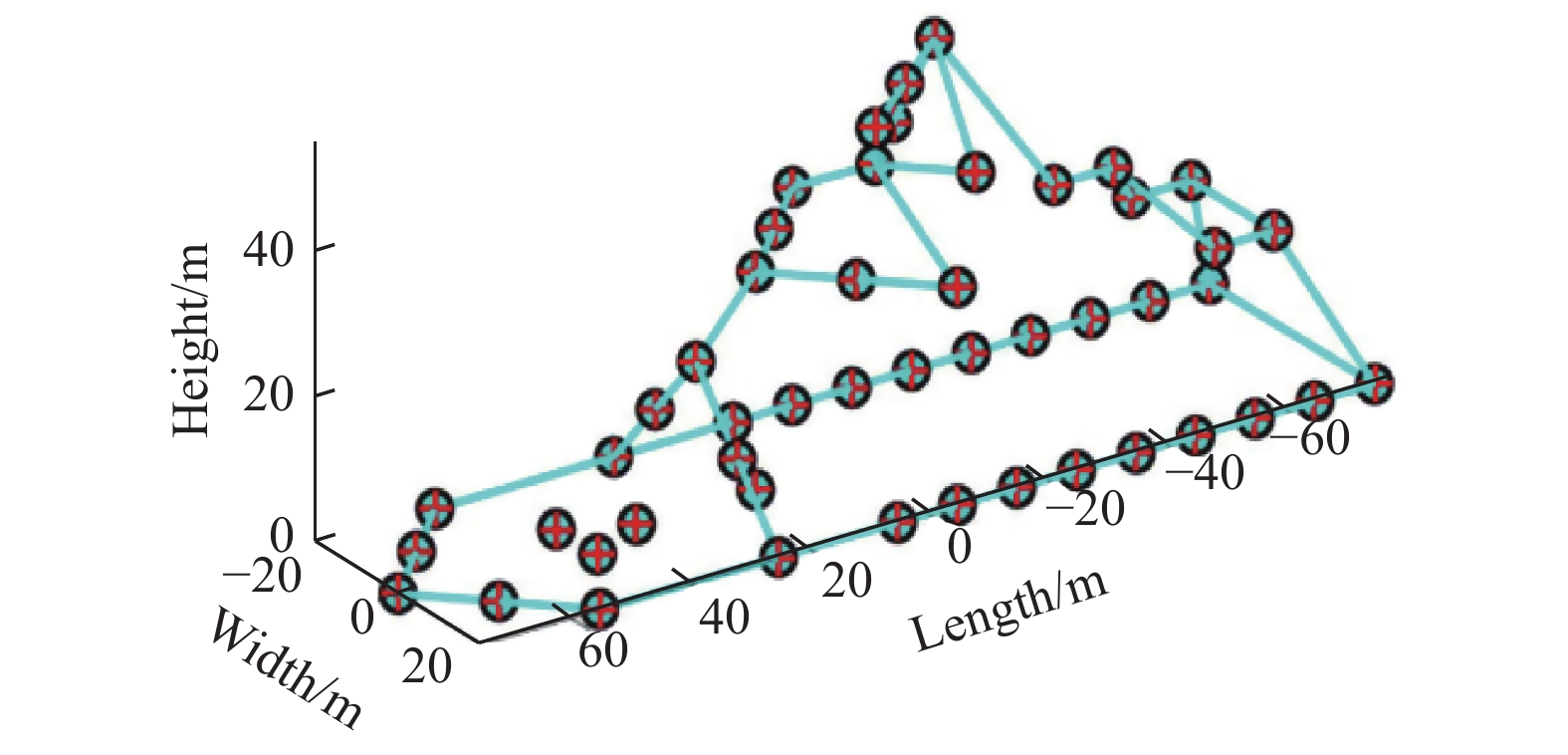
最近,Zhang Tianyi等人[20]提到ISAR图像缩放与奇异值分解等操作均是非线性的,且易导致最终的三维成像受到误差传输与累积的影响。基于此,提出了一种改进的基于运动参数与DNN的ISAR三维成像方法。该方法实现了从运动参数估计到三维成像的端到端转换,并将图像缩放和三维成像融为一体,能够避免误差的传递和累积。在仿真实验中,利用目标的运动参数与散射点模型生成综合数据集,且训练数据集与测试数据集的比例是7∶3。此外,一次训练所选取的样本数与学习率分别是8与1×10−5,并且自适应矩估计也在训练期间使用,其参数根据文献[81]设置。然后,对DNN进行训练,当测试损耗大约降低到0时,即可精确地估计出目标的运动参数,并且DNN可以很容易地实现从目标运动参数到三维成像的转换。图3展示了三维成像结果与目标散射点模型之间的比较,可以看出所提方法具有很高的重构精度。不过,生成数据集的目标参数过于简单,在实际应用中效果如何尚待验证。
![]()
1.3 基于目标旋转特性的ISAR三维成像
由于自旋目标的二维投影平面会时刻发生变化且变化幅度大,因此不能通过常规的单天线ISAR系统捕获的多通道信息或时间信息对其进行三维成像。经研究发现,可以通过目标的旋转运动特性对其进行三维成像。随着研究不断的深入,目前将单天线ISAR三维成像应用中的自旋目标进一步地划分为远场转台目标、近场转台目标与高速旋转目标,本部分主要对这三种目标的ISAR三维成像进行综述。
针对远场转台目标,张弛等人[21]通过目标与天线之间的几何关系以及目标的自旋运动特性对回波方程进行推导,获得了目标沿距离域、轨迹域和垂直于轨迹域的三维信息,然后通过后向投影(back projection,BP)算法即可对自旋目标进行三维成像。后来,崔扬[22]提出了三种对远场转台目标进行ISAR三维成像的方法,分别为距离-多普勒(range-Doppler,RD)法、基于一维距离像的三维成像法与基于ISAR二维回波数据的三维成像法。其中,后两种成像方法不受目标运动方式的限制且具有实现简单、成像效果好与稳定等优点。但是,这三种方法都是在目标运动参数精确已知的条件下才有效,比较适用于卫星、空间站等目标的三维成像,因此应用范围受到了一定的限制。
相对于远场转台目标,近场转台目标在回波信号处理上较繁琐一些。如果雷达探测的是大型近场目标,接收到的回波信号近似为平面波是无效的,必须考虑波前曲率,直接对其进行处理得到的ISAR图像散焦严重[82-83]。基于此问题,J. Fortuny[23]提出了一种基于近场聚焦函数与频域后向散射场之间方位卷积的算法,可以获取较高质量的ISAR三维图像,并通过EMSL(注:一种专门用于三维线性和ISAR成像的欧洲大型设备)验证了所提算法的有效性。
当成像对象为高速旋转的目标时,例如太空中的空间碎片,会存在以下问题:高速旋转目标的高速非平稳运动会导致回波信号出现严重的越分辨单元徙动现象,且散射点的瞬时多普勒频率会发生剧烈的变化;成像系统很有可能位于回波数据缺失、目标自遮挡和强噪声等复杂的观测环境;高速旋转目标即使在很短的成像时间内也会旋转多个周期,因此需要很高的采样频率才能实现目标的高分辨率成像,对系统硬件的要求非常高。基于上述问题,研究者们对高速旋转目标的ISAR三维成像进行了研究.
Wang Qi等人[24]首先利用平动补偿算法将高速旋转目标的回波信号等效成了高速转台模型。然后将目标散射点旋转引起的多普勒频率建模为正弦模型,实现了散射点能量的积累,并利用广义Radon变换算法提取目标散射点的三维位置。最后结合广义Radon变换和改进后的CLEAN算法用于获取目标的运动参数,从而得到目标的三维图像。该方法不需要多普勒分析等步骤,因此避免了高速旋转目标导致的多普勒测量误差带来的图像模糊问题。但能量积累是一个四维曲线搜索的过程,计算成本较高。基于此问题,Zhang Lei等人[25]研究出了专门针对高速旋转目标三维成像的二维匹配滤波器(matched filter,MF)组,通过硬件系统方面的改进明显提升了三维成像的效率。
Yu Ning等人[26]则根据高速旋转目标的三维成像几何将成像问题转化为参数优化方面的数学问题。其中,结合改进的粒子群算法和逆Radon变换算法估计出散射点沿方位向以及距离向的投影长度,再利用目标散射点的高度值完成目标的三维成像。该方法能够解决目标自遮挡、数据缺失和脉冲重复频率不足等引起的多普勒模糊问题,并且计算量较小,具有一定的实用价值。不过当成像目标尺寸较小时,不能获取足够的成像信息,因此会影响成像的效果。对尺寸较小的高速旋转目标进行有效的成像是下一步的研究方向。
宽带信号虽然具有高分辨率成像的优点,但直接发射大带宽信号对系统硬件的要求较高,因此李军等人[27]提出了一种基于窄带步进频率合成的ISAR三维成像方法。首先通过窄带子脉冲信号获取目标多帧的ISAR图像,然后结合目标的运动参数并采用频带合成技术对所有子脉冲的ISAR图像进行融合,从而实现目标的高分辨率三维成像。在该方法中,通过频带合成技术使发射的窄带信号具有较高的成像分辨率,同时降低了宽带信号对系统硬件的要求,并且窄带信号的使用有效解决了高速旋转目标引起多普勒变化造成的图像模糊问题。
基于目标旋转运动特性的单天线ISAR三维成像技术是根据目标的运动特点实现对目标三维特征的识别,特别适用于自转的空间目标。可见,利用运动特性从回波信号中提取目标的三维特性是一个不错的思路,因此可以利用舰船所做的三维摇摆运动对其三维特征进行解译。然而,由于单天线ISAR系统配置的限制,如何克服低信噪比(signal-to-noise,SNR)的成像环境、解决目标自遮挡的问题与获取准确的目标运动参数等均是有效三维成像的难点。
2 InISAR三维成像
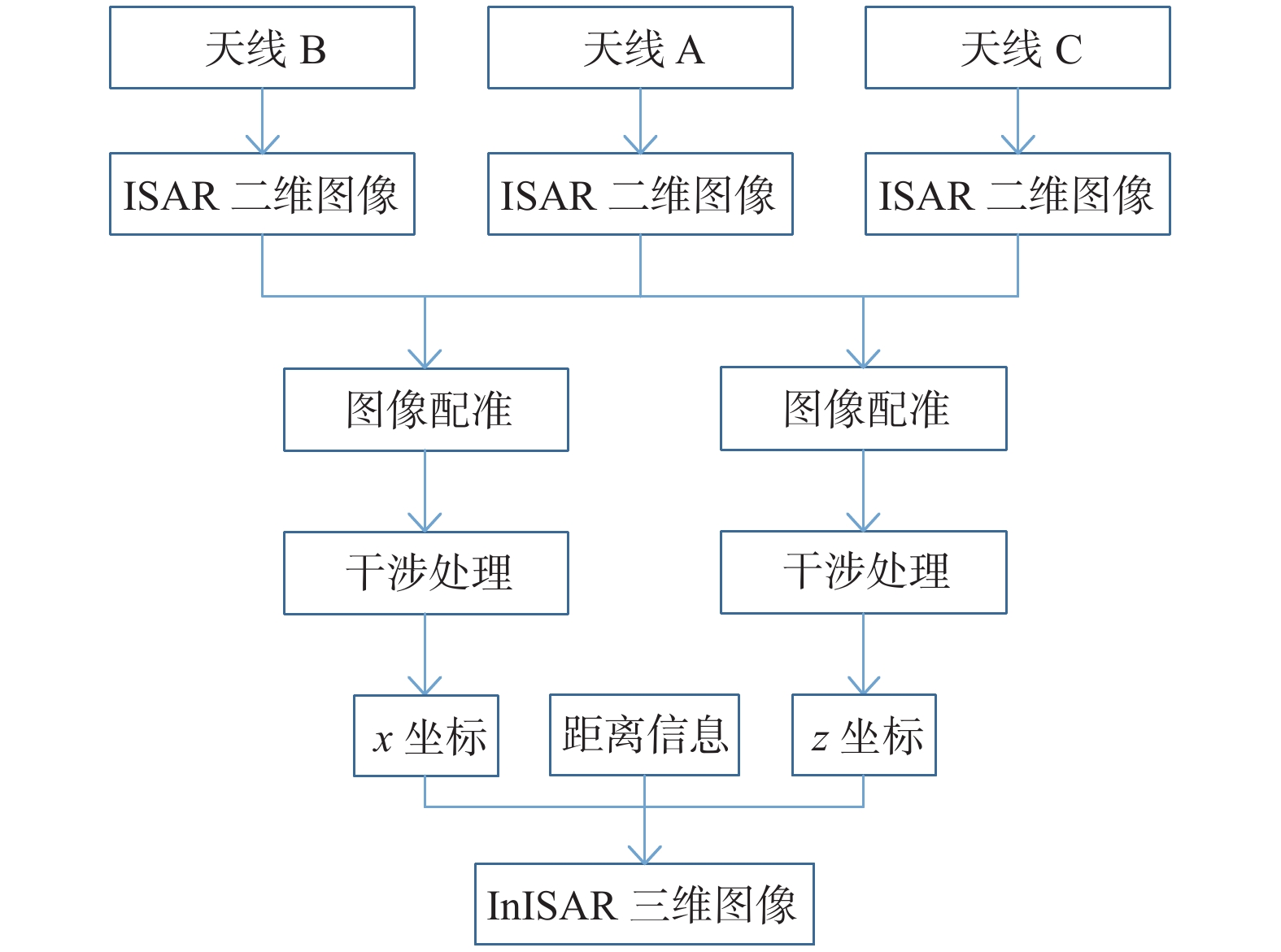
基于ISAR二维图像序列的三维成像方法通过单根雷达天线以时间换空间的策略实现目标的三维成像,需要较长的观测时间,并且存在散射体中心匹配困难、重构误差大等问题。因此研究学者们利用空间代替时间的策略,通过在不同的空间位置布置多根雷达天线在同一时间内完成目标的三维成像,促使了InISAR三维成像技术的诞生。在InISAR成像中,天线之间的距离远远小于雷达系统与目标之间的距离,因此多根天线得到的ISAR图像之间非常相近,进而可以简化图像中散射体中心的提取与匹配的过程,且可以提高散射体中心三维重构的精度。由于接收天线位置的不同,每根天线收到的回波信号的波程不同,进而导致ISAR图像之间像素相位信息的差异。然后利用干涉方法将ISAR图像之间的相位信息解算为目标散射点的空间位置信息,再结合ISAR图像二维分辨能力即可实现目标的三维成像,成像流程如图4所示。与和差波束三维成像方法类似,InISAR三维成像本质上是利用多天线回波信号之间的相位差异求解目标在三维空间中的位置。
M.Soumekh[84]首次在自动飞机着陆(automatic aircraft landing,AAL)系统中使用双天线配置的InISAR系统检测飞机的飞行方向,并证明了InISAR系统中包含的相位信息可以检测飞机飞行角度变化的情况。许小剑等人[28]则是对两根雷达天线的ISAR图像进行干涉得到了目标散射点的高度图像。后来,王根元等人[29]和张群等人[30]对两根天线的InISAR系统进行了升级,利用三天线配置的InISAR系统实现了目标的三维成像。在文献[29-30]的基础上,InISAR三维成像技术得以发展,研究者们分别从天线配置、图像配准、成像算法、成像几何与成像系统等不同的角度对InISAR三维成像进行了研究。本节首先从提升三维成像质量的角度入手,对InISAR中的天线配置、图像配准、高质量ISAR图像的获取、斜视处理等方面进行综述;然后分别介绍机载InISAR三维成像、星载InISAR三维成像、双/多基地InISAR三维成像与太赫兹InISAR三维成像等多种成像体制,表2总结了InISAR各成像体制的优势成像目标、体制特点以及目前存在的困难,便于各体制之间的对比。
表 2 InISAR各成像体制的优势成像目标、体制特点以及目前存在的困难Tab. 2 Advantage imaging target, characteristics and existed difficulties of all InISAR imaging mechanisms成像体制 优势成像目标 体制特点 目前存在的困难 机载InISAR 空中目标、舰船 灵活;能够大范围获取舰船目标的态势信息 信杂比与SNR低;基线易发生变化;目标运动参数测量的精度不高;ISAR成像易散焦 星载InISAR 空间目标 能够避开大气窗口对成像质量的影响;能够实现对空间目标更大范围的搜索与观测 成像环境复杂;星载卫星姿态抖动将会对回波信号的幅度、频率以及相位造成一定的影响;高速运动目标的成像问题;外太空非平稳信号的处理问题;基线易发生变化;目标运动参数测量的精度不高 双/多基地InISAR 空中目标、舰船 性能优异;抗干扰性强;隐蔽性高;能对隐身目标进行探测;获取的信息量大 系统配置复杂;需解决三大同步问题;双基地InISAR系统的几何设计问题;多基地InISAR图像融合性能有待提高 太赫兹InISAR 空中目标、舰船 成像分辨率高;抗干扰能力强 技术不够成熟,还需继续深入 2.1 天线配置
经研究,天线配置主要由三要素组成,分别为:天线数量、基线长度与几何构型,接下来对此三要素进行简要介绍。
1)天线数量。InISAR一般划分为双天线InISAR[28]、三天线InISAR[31]与四天线InISAR[32]等。其中,三天线配置的InISAR系统由于结构简单、天线数量少的优势被广泛使用,本文所讨论的InISAR三维成像针对的都是三天线配置的InISAR系统。另外,刘承兰等人[33]对单天线InISAR三维成像技术进行了研究,不过该成像方法对目标运动参数测量精度的要求比较高,在实际的应用中实现三维成像具有一定的难度。
2)基线长度。李丽亚[34]讨论了方位向分辨率与基线长度的关系,以及基线去相关的问题,并根据“黄金法则”推导出了InISAR系统中最优基线的计算公式,具有一定的参考价值。针对在成像的过程中基线长度发生变化的问题,沈楠[35]提出了一种基于一维距离像的干涉相位补偿方法,可以补偿基线长度变化导致的测量误差。虽然在仿真实验中验证了该方法的有效性,但在实际应用中效果如何,尚待探索和验证。
3)几何构型。目前最常用的就是“L”构型的三天线配置,相对于其他构型的InISAR系统具有一定的优势。文献[35]与文献[36]均讨论了“L”构型三天线配置的InISAR系统中两条基线无法完全垂直的情况。但上述情况使干涉后的三维图像直观上很难反映出目标的真实形状和尺寸,不利于目标的识别与分类。基于此问题,荣加加等人[37]推导出了任意三天线配置的InISAR系统实现畸变三维成像坐标的修正公式,一定程度上弥补了传统InISAR三维成像的不足。
2.2 图像配准
由于目标散射点到不同天线的波程不同,同一散射点可能会位于不同ISAR图像的不同分辨单元中,导致图像出现失配的现象。因此需要利用图像配准技术将同一散射点在不同图像中的同一分辨单元中对齐,目的是保证ISAR图像之间较高的相关性,才能获取较高质量的InISAR三维图像。
图像配准常用的两种方法分别为基于最大相关系数的配准方法[38]和基于角运动参数的图像配准方法[39],但它们均属于参数估计的方法,会出现配准精度不高的问题。研究者们陆续提出了基于特显点的图像配准法[40]、基于相位校正的图像配准法[41]、基于逐级匹配的图像配准法[42]、基于联合各自窗口采样和修正运动补偿的图像配准法[43]、基于波程差补偿的图像配准法[44]、基于残余平动分量补偿的图像配准法[45]、基于联合通道相位差运算的图像配准法[46]与非相干融合图像配准法[47]等,一定程度上提高了图像配准的精度或效率。经总结,大致可以从ISAR图像的角度或InISAR系统几何结构的角度实现InISAR系统的图像配准。
目前联合运动补偿的方法被研究学者们广泛关注[48-49],该方法相比于图像配准方法有着更显著的效果。该方法不仅省略了图像配准的步骤,保证了各天线之间的相干性,而且有效提高了最终InISAR三维成像的质量,更适合实际的工程应用。图5是利用小型InISAR系统对民航三维成像的结果[48]。可见,成像效果还是不错的,不过受噪声的影响比较大,处理过程中应该选择SNR相对较大的参考图像。如果将亚像素级别的运动补偿方法[85]应用到联合运动补偿方法中,不仅可以提高抵抗噪声的能力,而且可以极大程度提高InISAR三维图像的质量,对目标识别的实际应用会更加有利。
2.3 高质量ISAR图像的获取
在实际应用中获取理想的InISAR三维图像并不是一件容易的事情。获取清晰的ISAR图像与保证ISAR图像之间较高的相关性是获取高质量InISAR 三维图像的重要因素。然而,上文提到的图像配准只能保证各ISAR图像之间具有较高的相关性,若想获取清晰的目标ISAR图像,还需从ISAR二维成像过程中的运动补偿[50]与成像算法[51-52]等方面进行相关的研究。
在InISAR成像技术中,运动补偿主要存在着两种方式:统一聚焦与独立聚焦[50]。统一聚焦是指InISAR系统采用中心天线所估计的运动参数同时对三根天线进行运动补偿,补偿精度相对较高一些;独立聚焦是指三根天线分别独自进行运动补偿,在解决图像失配和相位模糊等方面更具有优势。使用哪种方式实现InISAR系统回波信号的补偿需要根据实际应用的需求来进行决定,一般情况下处理方式简单的独立聚焦的运动补偿方式比较常用一些。
在实际的观测场景中,由于非合作目标运动的复杂性,散射点的多普勒频率具有时变特性,若直接采用RD算法进行成像,ISAR图像中的散射点将会出现散焦的问题。一般采用联合时频分析算法代替RD成像算法来获取高机动目标的高质量InISAR三维图像[51-52]。其中,联合处理的目的是为了防止单独对各通道回波信号进行时频分析导致ISAR图像中相位信息出现丢失的问题。然而,时频分析算法需面对计算负担大的问题,若能将成像时间选取的方法[86-88]用于高质量InISAR三维成像的应用中,将有助于提高成像的效率。
2.4 斜视处理
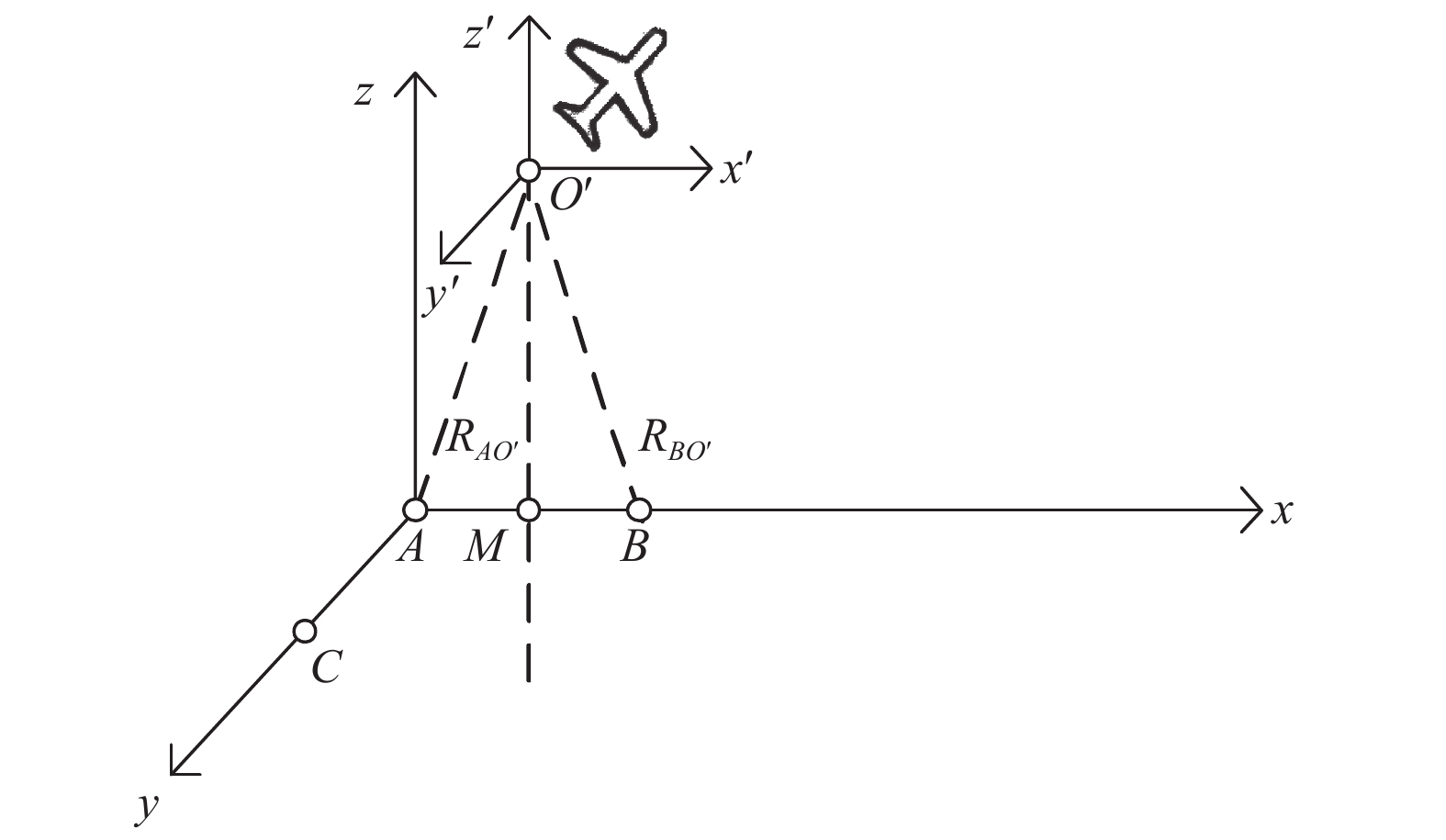
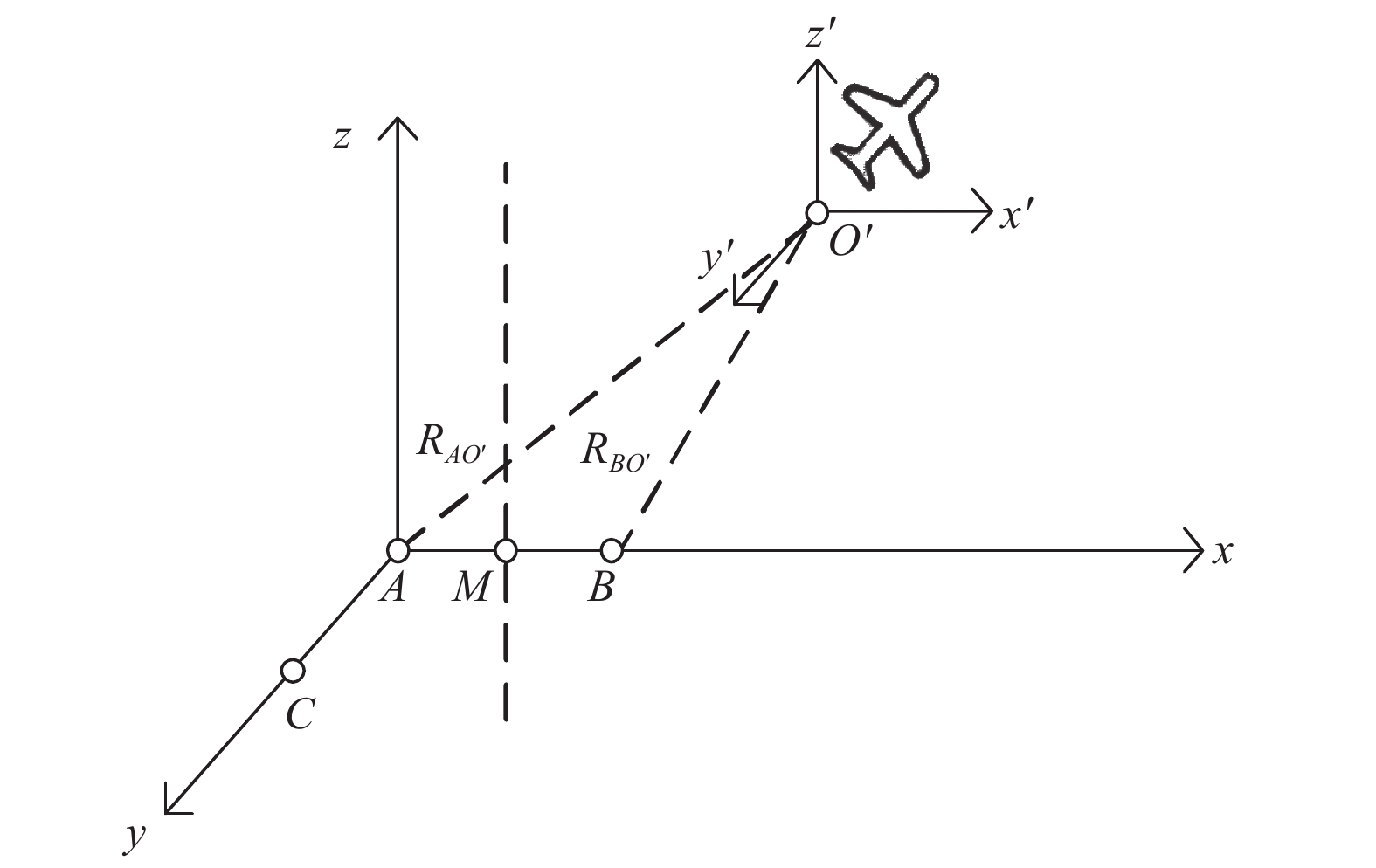
当被观测的目标在同一基线上两根天线之间的垂直平分线附近时,目标则位于雷达探测的正视成像几何(如图6所示),否则,位于雷达探测的斜视成像几何(如图7所示)。在实际的成像场景中,目标通常位于雷达的斜视几何探测中,此时无法保证目标参数估计的精度,宋建伟[45]和田彪等人[53]分别提出了基于PSO的图像配准方法和基于独立参考距离选择的图像配准方法,均解决了斜视成像几何条件下图像的失配问题。
斜视成像几何在InISAR三维成像的过程中还会造成如下两个问题[53]:1)获取的干涉相位信息除了含有正视成像几何条件下的主相位,还含有斜视附加相位,导致干涉相位信息和散射点的坐标值不再满足线性关系;2)目标散射点到天线的距离大于散射点第三维度真实的坐标值,因此不能使用ISAR图像中的距离信息直接进行三维成像,否则生成的三维图像会发生扭曲。
针对斜视附加相位的问题,田彪等人[53]与刘承兰等人[54]分别提出了斜视迭代改进(squint iteration improvement,SII)法与非线性最小二乘(nonlinear least square,NLS)法。这两种方法均可以消除斜视附加相位并可以准确获取目标散射点沿基线方向的坐标值。针对图像扭曲的问题,通过坐标变换的方法即可获取目标散射点第三维度真实的坐标值[55]。经实验验证,虽然可以补偿掉斜视附加相位并能够获取目标散射点真实的三维坐标值,但是成像效果仍然没有正视情况下的质量高。如果在目标运动参数已被估计出的前提下,从成像模型几何变换的角度实现斜视成像几何条件下目标的三维成像效果可能会更好,但在实际成像应用中效果如何,还需进一步的探索与验证。
2.5 机载InISAR三维成像
由于飞机平台的机动性,机载雷达可以灵活地获取大范围的态势信息,因此利用机载ISAR系统对海上航行的舰船目标进行成像与识别得到了快速的发展。
A. Fontana等人[56-57]提出了机载InISAR三维成像的方法,并创建了适用于舰船目标的InISAR三维成像的几何模型。在实际实验中,使用的是机载相控阵多功能成像雷达(phased array multifunctional imaging radar, PAMIR),其水平、垂直基线长分别为27 cm、67 cm,如图8所示。图9为PAMIR的InISAR三维成像结果,从中能够对舰船的船头与船尾进行识别,并且所观测到的目标高度与舰船的实际高度一致,证明了机载InISAR系统的可行性。不过从图9还可以看出舰船目标的三维重构精度并不理想,说明大型InISAR系统的三维成像还在初步探索阶段。
最近几年,无人机技术有了巨大的提升,在人们的生活中也越来越普及化。相比于飞机,无人机具有灵活、易于部署和成本低等优势。E.Giusti等人[58]首次提出了无人机InISAR系统的三维成像方法。对于携带接收机的三个无人机,它们之间的“等效基线”需要满足一定的条件才能进行有效的干涉处理,在实际的实验中还具有一定的难度,且如何进行布站有利于提高成像的性能,还需进一步的研究与探索。
由于存在目标与飞行器之间的相对径向平动、飞行器的三轴旋转与目标的三轴旋转等运动,而且还会出现各种海况,进而影响回波信号的信杂比,均会使机载ISAR成像较为困难。并且在机载InISAR三维成像的过程中,基线的几何构型与长度并不能一直保持稳定,对参数的估计和干涉相位信息的获取等方面产生不利的影响,成像质量也会随之下降。可见在实际应用中,机载InISAR三维成像具有一定的难度。完善雷达成像系统的几何配置、克服复杂成像环境的不利影响、设计出更优质的成像算法等方面是该成像体制接下来的研究方向。
2.6 星载InISAR三维成像
为了有效避开大气层对外太空目标观测的影响并提高雷达成像的质量,有必要发展星载InISAR三维成像技术。曹星慧[59]结合卫星平台做轨道运动的特点,对成像过程中的卫星姿态抖动、信号频率以及初始相位对ISAR成像所造成的不利影响进行了分析。此外,提出了一种适用于星载InISAR系统的基于非正交基线的三维成像方法,并通过仿真获取了轮廓清晰、边缘整齐的空间目标InISAR三维图像,验证了所提方法的有效性。由于星载ISAR处在的成像环境比较复杂,存在着诸多问题亟需我们对其进行探索,例如高速运动空间目标的成像问题、外太空中非平稳信号的处理问题、InISAR的基线问题与参数测量的精度问题等。
2.7 双/多基地InISAR三维成像
单基地雷达系统只能提供目标单一视线方向的微波信息,当目标与雷达之间没有任何的相对旋转运动时,目标散射点就不能在方位向上被分离,导致三维成像失效。即使可以对目标进行成像,由于雷达视线方向的单一性,也只能获取目标的少量信息。在双/多基地InISAR三维成像中,通过合理布站使多个站点相互配合对同一目标进行观测,可以提高三维成像的性能。相对于单基地雷达系统,双/多基地雷达系统具有成像性能优异、抗干扰性强、隐蔽性高、能对隐身目标进行探测等优势。下面分别对双基地InISAR三维成像和多基地InISAR三维成像的技术以及它们的研究现状进行总结。
2.7.1 双基地InISAR三维成像
在常规的双基地逆合成孔径雷达(bistatic inverse synthetic aperture radar, B-ISAR)成像中,由于与单基地ISAR的成像方法类似,为了简单处理,通常采用双基地等效单基地(bistatically equivalent monostatic,BEM)的成像模型[89]。不过BEM成像模型并不总是有效的,在B-ISAR成像的过程中,由于距离方向和多普勒方向并不总是垂直的关系,导致获取的ISAR图像发生扭曲。基于此问题,马长征等人[60]将B-ISAR系统与InISAR三维成像技术相结合,解决了图像扭曲的问题,并实现了目标的三维成像。
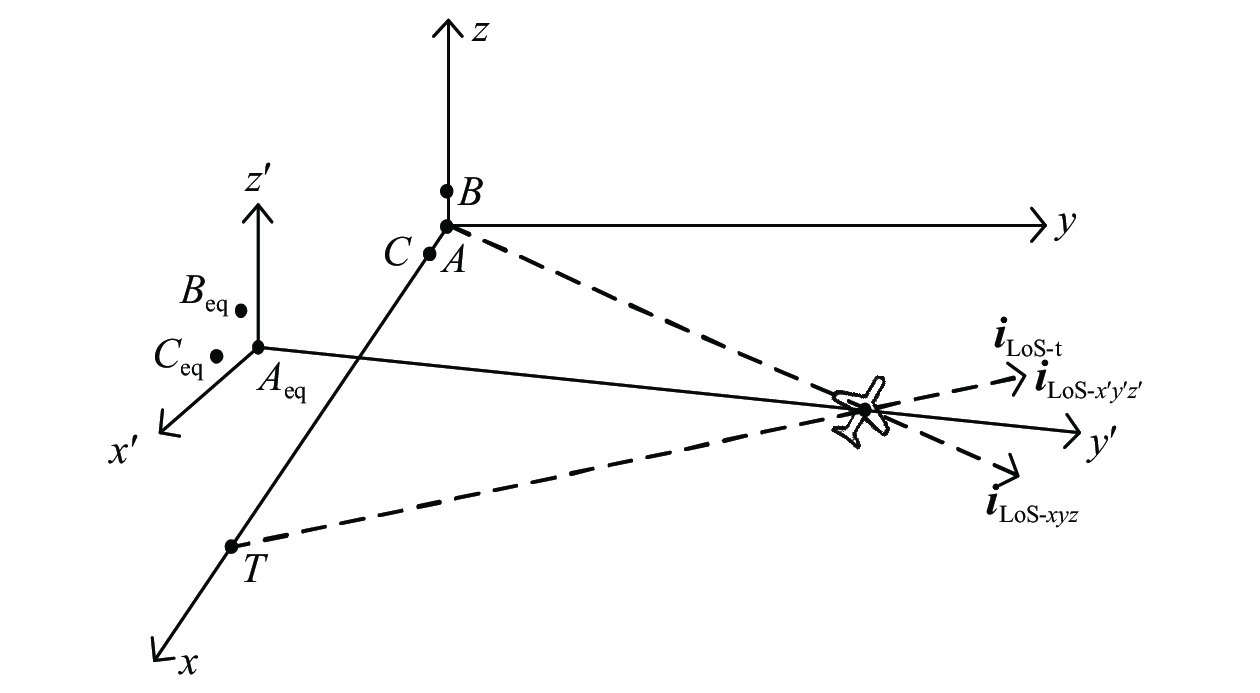
后来,研究者们开始对双基地InISAR三维成像技术展开研究,获取了一些研究进展[61-65]。通常,双基地InISAR系统的雷达配置为一个发射机和三个接收机,分别位于不同的位置,如图10所示。其中,T为发射机,A、B、C为接收机;Aeq、Beq、Ceq分别为发射机T和接收机A、B、C等效后的收发共用雷达;{{\boldsymbol{i}}_{{\rm{LoS}} - {{T}}}}、{{\boldsymbol{i}}_{{\rm{LoS}} - xyz}}、{{\boldsymbol{i}}_{{\rm{L}}{\text{o}}{\rm{S}} - x'y'z'}}分别为发射机、三个接收机以及三个等效后收发共用雷达的视线方向。
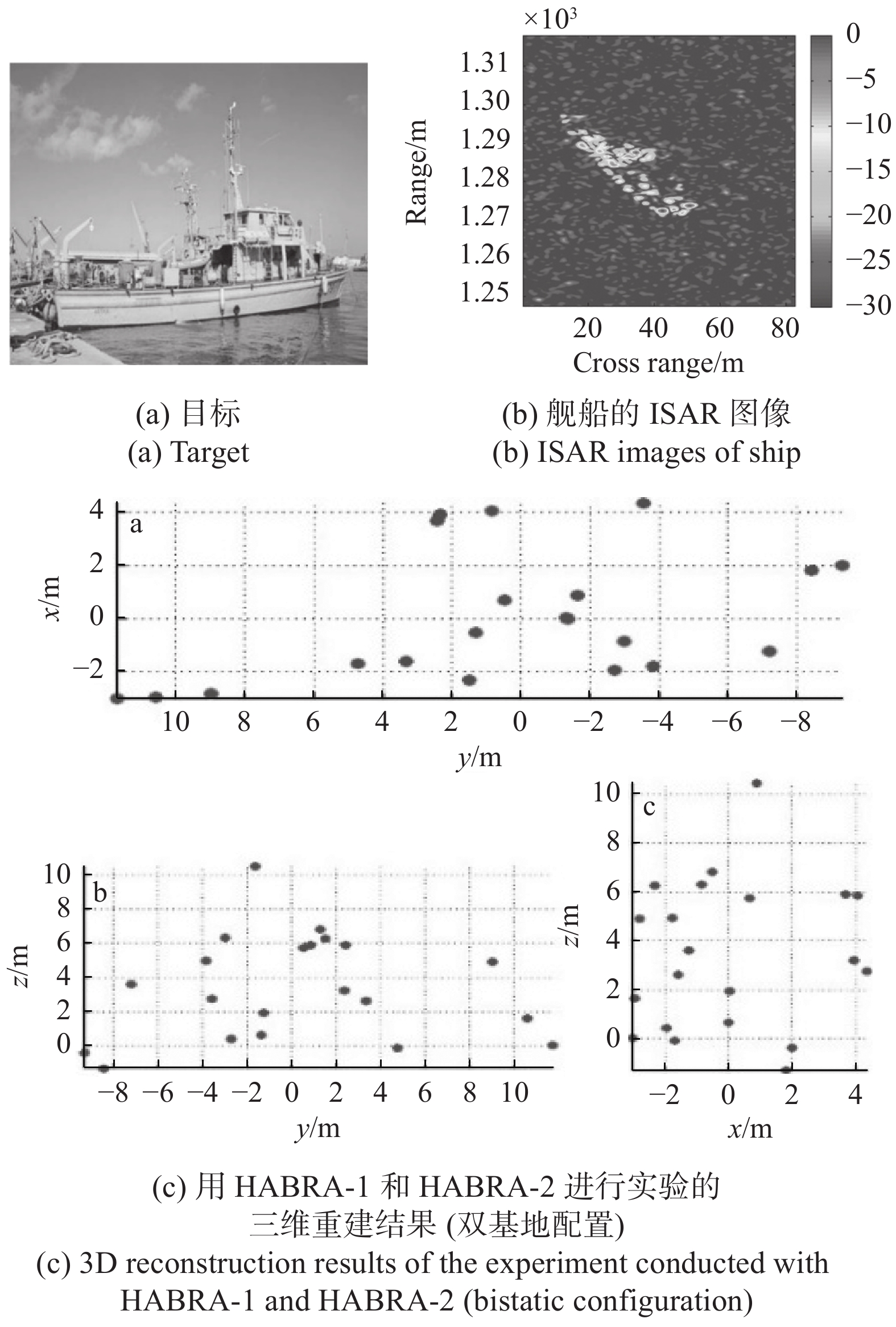
虽然双基地InISAR三维成像相比于单基地InISAR三维成像具有更丰富的目标散射点信息,但通常存在如下两个问题[61]:1)如图10所示,接收机A、B、C分别位于两条垂直的基线上,但等效后的收发共用天线{A_{{\rm{eq}}}}、{B_{{\rm{eq}}}}、{C_{{\rm{eq}}}}可能不再位于两条垂直的基线上;2)等效后的收发共用天线{A_{{\rm{eq}}}}、{B_{{\rm{eq}}}}、{C_{{\rm{eq}}}}的雷达视线方向与它们所在的平面可能不再是垂直关系,等效后的成像模型则为斜视模型。基于这两个问题,D. Staglianò等人[62]提出了一种可以在任意的双基地InISAR几何结构下对目标进行三维成像的方法。2014年10月初,对位于意大利利沃诺的两个X波段干涉地面线性调频连续波雷达传感器HABRA-1和HABRA-2进行了数据采集实验,实际雷达系统与成像结果分别如图11与图12所示。虽然通过实际实验验证了所提方法的有效性,不过由于舰船ISAR图像的分辨率不高,导致CLEAN算法在提取主要散射点时把应该保留的散射点清除掉,因此三维图像中的散射点数量较少,舰船目标更多的特征不能得以表现。
在舰船目标的ISAR成像中,由于船只航行时的偏航、横滚和俯仰旋转,导致多普勒频率具有时变特性,没有足够长的积累时间来获得较高的方位向分辨率。尽管针对舰船目标提出了机载InISAR三维成像的方法,但由于机载InISAR系统配置的不稳定性,并不能一直有效地获取高质量的三维图像。据研究表明,双基地InISAR系统的结构设计可以避免舰船目标的上述特点所导致的成像失败,因此非常适用于对舰船目标进行三维成像的应用[63-64]。
基线方向角、投影平面方向角以及双基地角等参数均会影响双基地InISAR系统中干涉相位信息计算的精度,进而影响目标三维重建的性能,并且这些参数可以唯一识别B-ISAR的几何形状[65]。可见,B-ISAR的几何设计影响着最终的成像结果,如何通过B-ISAR的几何设计进一步提高三维成像的性能是双基地InISAR三维成像未来的研究方向。
2.7.2 多基地InISAR三维成像
将双基地InISAR扩展到多基地InISAR,使目标被全方位探测成为可能,通过合理布站并综合利用多幅图像可以获取目标更多相关的信息;在成像方面,将会显著提高目标三维形状重建的能力。在目前已发表的文献中,该类成像方法主要为基于非相干融合的多基地InISAR三维成像方法[66-67]。
图像融合是当前信息融合研究中的一个热点,通常是指利用特定的算法将两幅或多幅图像综合成一幅新的图像。通过两幅(或多幅)图像之间的互补性,使融合后的图像对成像目标有着更全面、更清晰的描述,从而有利于目标的识别与分类。在ISAR图像融合的应用中,如果雷达传感器之间具有一致性(空间、时间、相位同步),可以通过相干融合的方法对多幅ISAR图像进行相干叠加,具有分辨率高、成像时间短和对方位角依赖小等优势。在非相干融合的应用中,就不需要考虑雷达传感器是否具有一致性,通过非相干叠加的方法即可实现图像之间的融合[90],该融合方法获取的图像精度较低,但有利于对目标散射点的识别与分辨,且对相位相干性和目标运动参数估计误差的敏感性较低。在多基地InISAR三维成像中,使每个站点都满足空间、时间、相位三大同步条件具有一定的难度,而且需要对三个空间维度的数据进行融合,会增加信号融合的难度,因此利用非相干的方法实现三维图像的融合将具有较好的成像效果。
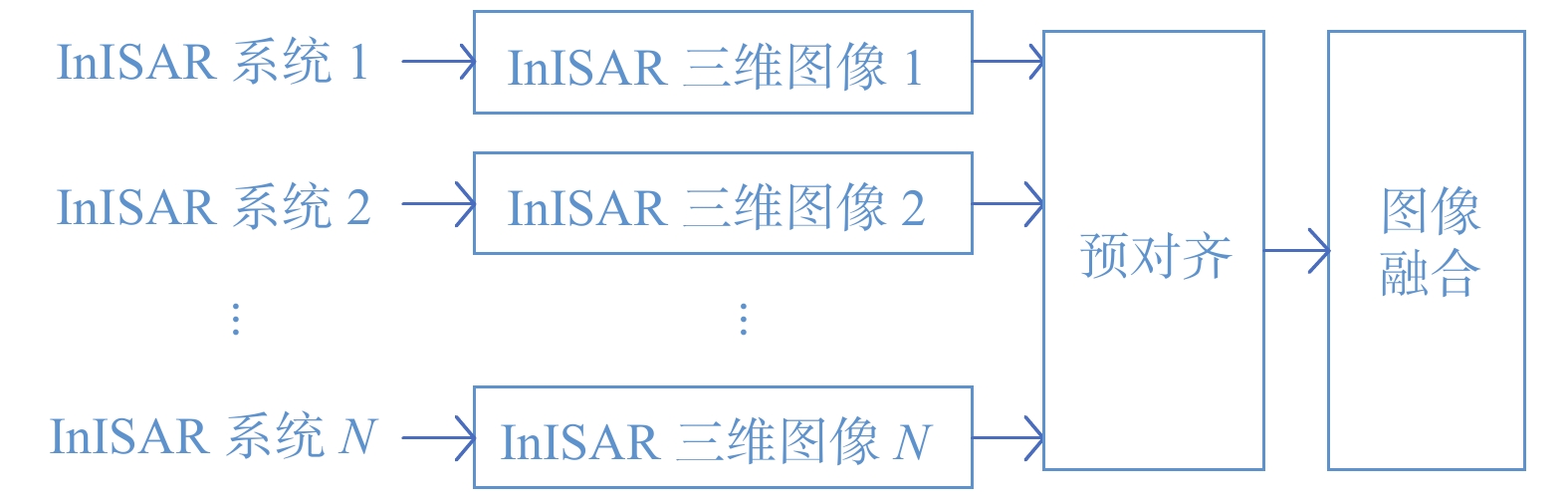
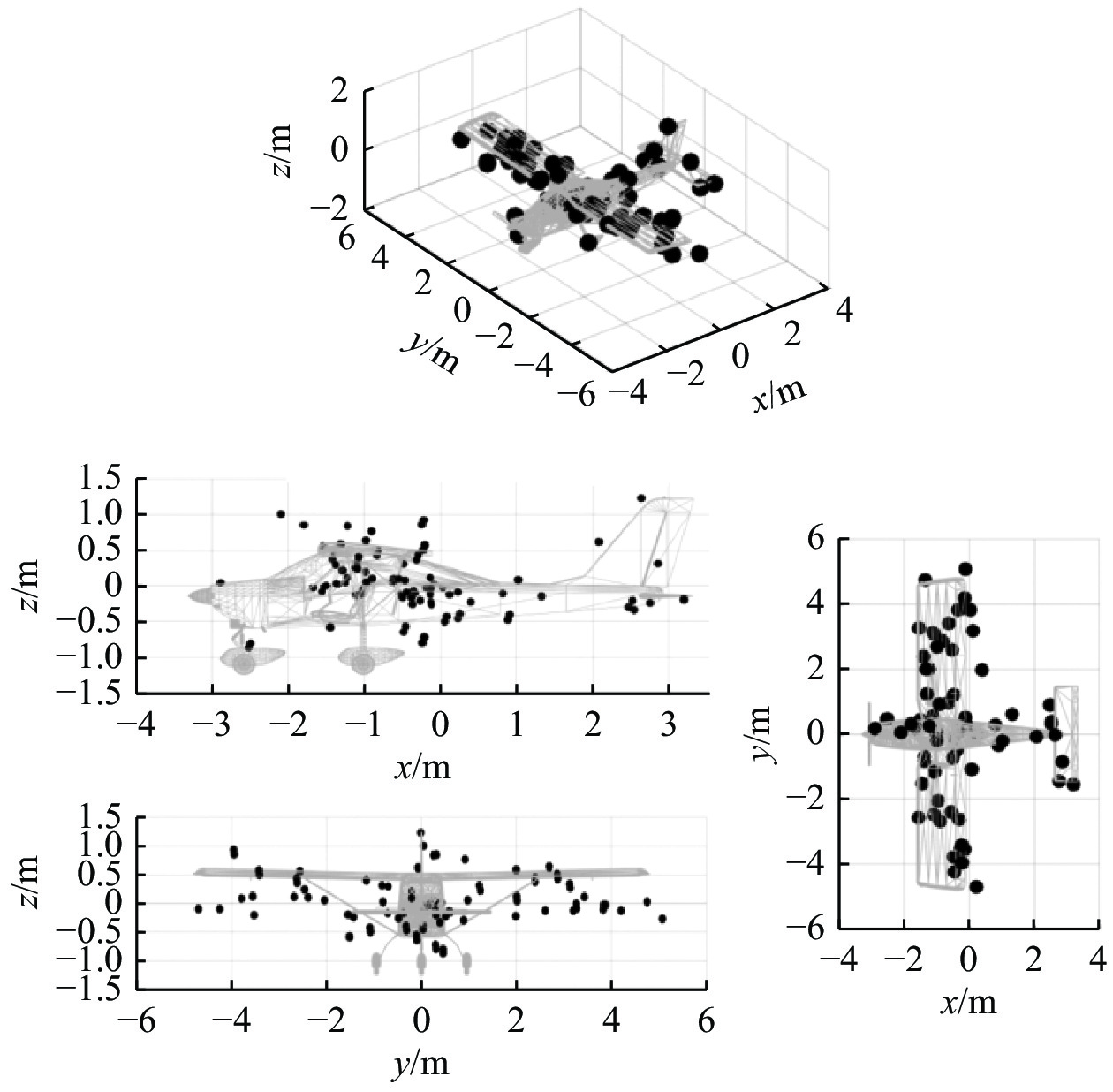
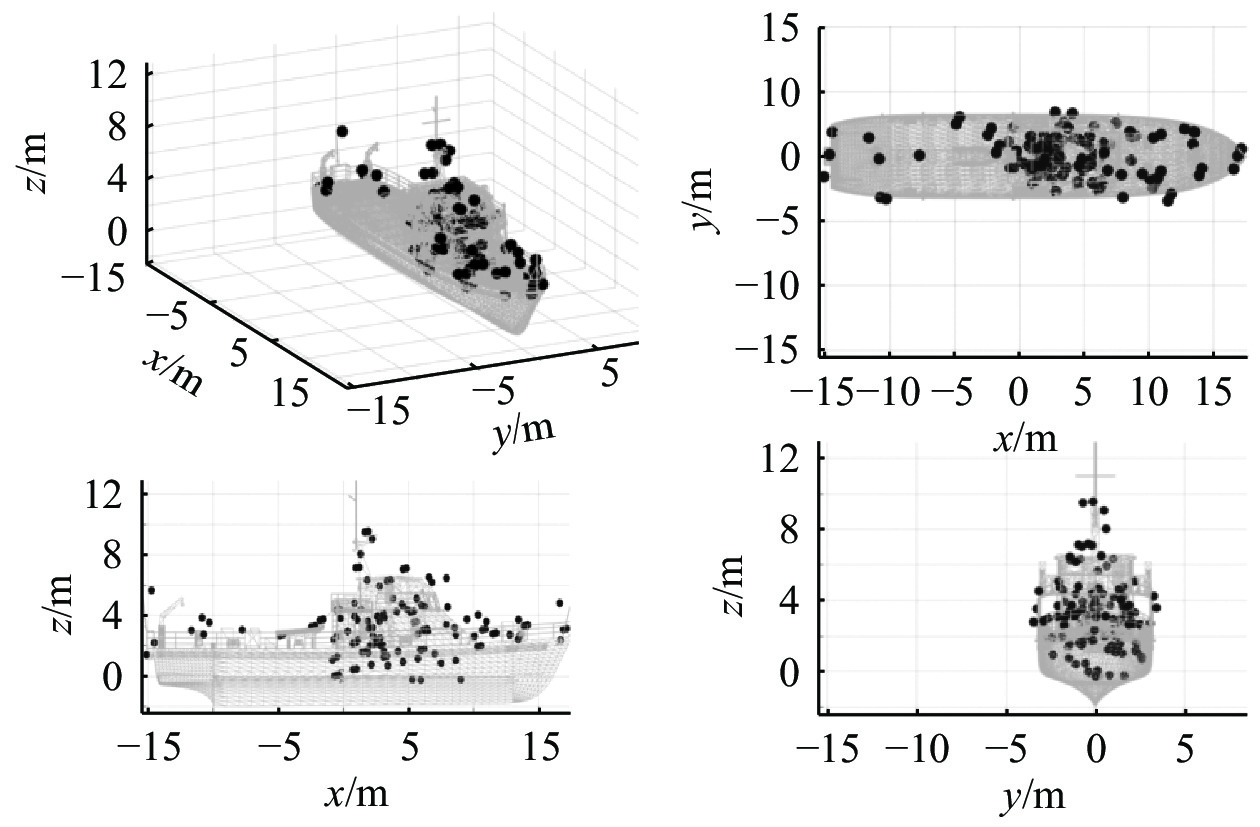
F. Salvetti等人[66]提出了一种基于非相干融合技术的多基地InISAR三维成像方法,具体流程如图13所示,该方法能够弥补InISAR成像能力不足的缺陷。随后,F. Salvetti等人[67]将每个站点多个时间段获取的三维图像融入到了多基地三维图像的非相干融合中。在NATO Set 196“非合作目标的多通道/多基地雷达成像”联合实验中分别对名为“Tecnam P92”的意大利高翼轻型飞机与名为“Astice”的意大利海军的一艘训练船进行了实测数据的实验,InISAR三维成像的实验结果如图14和图15所示。可见所提融合算法能够明显提升大型InISAR系统的成像效果,并解决了CLEAN算法提取散射点数量少的问题。但实验使用的方法是以图像之间的散射点高度误差、欧式距离等为融合依据实现多基地三维图像的非相干融合,需要对所有InISAR三维图像中的所有散射点依次进行判断,计算量较大。而且在实际成像应用中当InISAR三维图像相似度较低时,图像之间的散射点高度误差、欧式距离均有可能超过所设定的阈值,导致该融合方法出现失效。
![]()
2.8 太赫兹InISAR三维成像
太赫兹电磁波的频率覆盖范围为0.1~10 THz(波长为3 mm~30 µm)[91],该频率范围在许多应用中具有令人难以置信的发展前景。由于太赫兹ISAR发射的载波频率高,易产生大宽带的信号,因此在距离向上具有极高的成像分辨率;且太赫兹电磁波的波长短,在相同的观测时间内太赫兹ISAR能够获得更高的方位向分辨率[92]。基于上述太赫兹ISAR的优点,蒋彦雯等人[68]提出了一种基于双频联合处理的太赫兹InISAR三维成像方法。通过将三天线系统获取的回波信号按快时间域分为两个部分,并分别对该两部分的回波信号进行干涉三维成像,然后对两幅三维图像进行综合比较分析可实现质量较高的三维成像。相比于传统的InISAR三维成像方法,太赫兹InISAR三维成像具有更高的成像精度。在未来,回波信号的成像时间选取算法与优质的成像算法将会进一步提高太赫兹InISAR三维成像的性能。
3 阵列ISAR三维成像
在成像的过程中若出现了散射点闪烁现象,InISAR系统所获取沿基线方向上的散射点坐标值将是多个散射点合成的坐标值。由此可以看出,传统InISAR系统的三维分辨能力有限,因此不具备真正的三维成像能力。阵列ISAR三维成像作为InISAR成像的扩展,是将ISAR成像技术与实孔径阵列雷达结合的一种新成像体制。该成像方法是由互相垂直的天线阵列通过空间谱估计的方法结合ISAR图像的二维分辨能力实现目标散射点在三维空间的定位[69],理论上具有很强的三维成像性能。阵列ISAR与InISAR均是利用多通道技术实现的三维成像,区别主要体现在成像原理的不同与天线数量上的差异。
虽然阵列ISAR系统可以对合成散射点进行有效的分离,但在实际系统中,中大型阵列ISAR系统可以满足常规的非合作目标的成像工作,但往往会消耗大量的硬件成本与资源,难以在实际系统中实现;而小型阵列ISAR系统由于硬件配置的不足,具有成像分辨率低的问题,满足不了正常的成像需求。另外,均匀排列阵元之间的间距不能超过信号波长的一半,否则出现虚假成像的问题[70]。为了弥补系统硬件配置上的不足,研究者们分别通过稀疏阵列技术[70-73]和MIMO阵列雷达技术[74-77]来提高阵列ISAR三维成像的性能。
3.1 稀疏阵列ISAR三维成像
马长征等人[71]提出了一种基于二维稀疏阵列波束形成的ISAR三维成像方法,在减少天线数量的同时增宽了天线孔径,提高了系统的三维分辨能力。虽然稀疏阵列的使用使系统在提升分辨率与节省硬件成本等方面有一定的帮助,但是存在SNR低和旁瓣电平高等问题,导致获取的三维图像质量不高。随后,马长征等人[72]又提出了一种基于最大似然估计(maximum likelihood estimation,MLE)的稀疏阵列ISAR三维成像方法。在对目标运动参数完成初始估计的基础上,通过采用MLE算法并结合时域信息成功降低了图像的旁瓣电平,获取了清晰、无伪影的目标ISAR三维图像。
针对均匀排列阵元之间的间距不能超过信号波长一半的问题,年毅恒[70]提出了两种非均匀排布形式的稀疏阵列,分别为随机非均匀线阵和嵌套式互质线阵,均能解决虚假成像的问题。随后,还提出了一种迭代自适应谱估计(iterative adaptive approach,IAA)算法并应用于阵列ISAR三维成像中,不仅可以对高旁瓣进行有效的抑制,还进一步提高了阵列ISAR系统的三维成像能力。
焦泽坤等人[73]在稀疏线性阵列的基础上提出了一种基于稀疏贝叶斯推理的阵列ISAR三维成像方法,具有超高的成像分辨率。通过Ku波段的阵列ISAR系统对波音737飞机进行了实验,阵列天线以及三维成像结果如图16所示。可见,利用稀疏贝叶斯推理方法得到的三维图像具有很好的目标特征识别能力,也证明了阵列ISAR三维成像方法与高分辨率成像算法在实际应用中的可行性。不过从图像中仍能看到很多的虚假散射点,说明稀疏阵列存在SNR低的问题。
稀疏阵列ISAR系统相对于传统的阵列ISAR系统具有硬件成本低、成像性能强等优势,更适用于实际的成像应用。然而,稀疏阵列ISAR三维成像中不仅存在SNR低和旁瓣电平高等问题,还有不规则的阵元排列方式是否会影响各阵元所接收信号的相关性进而对成像结果造成不利的影响还需进一步的研究。这些不利因素将会对数据测量造成一定的误差,进而影响目标散射点三维重构的精度。如何对稀疏阵列中的阵元进行优化排列与研究更高分辨率的成像算法是稀疏阵列ISAR系统未来的研究方向。
3.2 MIMO-ISAR三维成像
虽然稀疏阵列ISAR在减少天线数量的使用上具有一定的成效,但MIMO阵列雷达技术可以显著减少天线的数量。相位中心近似(phase center approximation,PCA)理论的使用可以使一个发射阵元与一个接收阵元等效为一个收发共用单元[93]。将PCA理论应用于合理排布的MIMO阵列雷达中,可使少量的发射阵元与接收阵元等效为一个具有庞大数量的收发共用阵元的阵列,能够极大程度提高系统的工作性能。
与ISAR成像的原理不同,MIMO阵列雷达是通过一个脉冲(快照)的时间即可实现对目标的二维或三维成像。简单说ISAR是通过时间采样技术实现目标的成像,而MIMO阵列雷达是通过空间采样技术实现目标的成像。研究者为了缩短ISAR成像的相干处理时间,又为了进一步降低MIMO阵列雷达系统硬件的使用成本,于是将MIMO阵列雷达与ISAR成像技术进行了结合,即MIMO-ISAR成像技术[94]。目前MIMO-ISAR三维成像技术可分为两种:基于数据重排的MIMO-ISAR三维成像[74-75]与基于多视处理的MIMO-ISAR三维成像[76-77],下面分别进行介绍。
3.2.1 基于数据重排的MIMO-ISAR三维成像
研究发现,利用等效阵元在相干处理时间内获取的数据可估计出空间中未覆盖区域的数据[95]。Zhu Yutao等人[74]提出了一种基于数据重排的MIMO-ISAR三维成像的方法。首先根据目标的速度方向并通过插值技术完成回波信号的空间数据与时间数据的重排,重新排列的回波应被插值为具有相同采样间隔的均匀数据。其中,当目标移动的距离超过等效阵元之间的间距时,时间采样将会结束。然后采用二维傅里叶变换(Fourier transformation,FT)对重排数据进行处理,即可获取目标的三维图像。在成像的过程中,由于时间采样数据的引入提高了整体的采样密度,进一步提高了目标散射点三维重建的精度。不过插值的方法属于一种估计的方法,并不总是有效的,如果需要插值的数据量太大容易出现较大的积累误差,而且获取的图像旁瓣较高,均会影响到最终成像的质量。
针对插值技术的不足,王勇等人[75]采用压缩感知技术代替插值技术用于MIMO-ISAR三维成像技术,分析了采用合适的时间数据重排方式可以实现不同天线阵元接收信号的精确组合,并且需要补偿的时间数据和空间数据之间不会产生不等价性,并得出结论,沿阵列方向对数据进行重排可以使系统具有较高的分辨能力。然后采用压缩感知技术中二维联合处理的2D-SL0算法获取了目标高分辨率的三维图像,相比于插值技术具有更小的成像误差与更低的旁瓣。
3.2.2 基于多视处理的MIMO-ISAR三维成像
马长征等人[76]与郑通等人[77]对基于多视处理的MIMO-ISAR三维成像方法进行了研究,通过MIMO阵列雷达系统利用ISAR技术的时域信息获取目标多个脉冲时间的三维图像,再通过相干处理实现多帧三维图像的重构。如图17与图18所示,相比于经典的插值方法,多视处理的方法提高了最终图像的SNR与分辨率,并可抑制方位向上的高旁瓣,从而提高了图像的质量[77]。不过由于需要实现多次的三维成像,因此加重了系统的计算负担。
4 总结与展望
高分辨率、高效的成像算法与高SNR的成像环境永远是雷达成像发展的一个重要趋势。暗室实验[96]与小型雷达实验能够实现效果不错的ISAR三维成像,提高SNR、成像分辨率与重构精度是进一步的发展方向;而大型雷达系统目前成像效果不够理想,还需对目前的理论算法进行进一步的验证,因此ISAR三维成像目前主要处于理论研究阶段。由于成像原理的不同,部分ISAR三维成像体制只能在特定的场景才能得到较好的成像效果,因此在某个成像应用中选择一个合适的成像方法实现目标更多特征的提取是至关重要的。尽管目前已经存在多种ISAR三维成像体制及相应的成像方法,但仍面临着重构精度不高、效率偏低和系统复杂等方面的问题。下面主要从成像体制、成像模型与成像算法三个方面对ISAR三维成像进行展望分析。
1)成像体制
单天线ISAR三维成像技术通过单部雷达或天线即可实现目标的三维成像,具有结构简单、硬件成本低等优点,在机载或星载等雷达成像技术中也具有携带方便的优势。然而,为了能够满足现代高效、高分辨率、高质量与高SNR的三维成像需求,单天线ISAR三维成像技术面临着巨大的挑战。
InISAR三维成像技术利用多根天线可在同一时间对目标进行三维成像,具有独特的空间分布优势。然而,多天线的使用势必会加大系统的计算负担、硬件成本以及空间消耗,且对运动补偿、图像配准与斜视处理等算法的精度要求较高。传统InISAR三维成像技术能够满足平稳运动目标(例如民航)的成像需求;在舰船、战斗机等非平稳运动目标的成像应用中,复杂的三维摆动或高速行驶运动均会造成ISAR成像的散焦问题,因此在成像之前需要利用时频分析、时间窗选取与精度较高的运动补偿等算法来处理InISAR回波信号;在空间目标的成像应用中,由于成像距离远、信号功率不足、SNR低等原因,均会导致成像质量不佳,因此需要发展星载成像技术或高分辨率的成像算法。针对处在运动平台的雷达系统,目标运动参数的准确测量是其中的关键,未来的研究重点主要为适用于机载平台的运动补偿与图像配准方法。在多基地InISAR三维成像中,图像融合是其中最重要的处理环节。目前最新的技术主要是将多时相、多基地的InISAR三维图像进行融合,相对于单基地InISAR可以更好地对目标进行识别。然而,多基地InISAR系统的主要不足是系统配置复杂,且需解决三大同步等问题。而且目前的多基地InISAR系统的三维重建结果并不是很理想,仍需发展优质的融合算法实现目标高质量的三维重构。
相比于其他的ISAR三维成像体制,理论上阵列ISAR具有更佳的成像性能,可对任何运动的目标进行成像,但硬件成本较高。未来的研究重点是发展适应于低SNR等情况下的超分辨率算法以进一步降低所需天线阵元的数量。而针对MIMO-ISAR新型雷达体制的成像方法,可以从频率编码、相位编码设计等角度提升三维成像的性能。
在实际的成像应用中,成像体制的选择主要由成像场景而定。经总结,ISAR三维成像体制的不同主要体现在雷达/天线数量的不同、雷达/天线排列方式的不同、成像原理的不同、载体的不同、发射信号波长的不同与发射信号带宽的不同等方面。在未来,仍可从以上六个方面对新成像体制进行研究。
2)成像模型
目前,ISAR三维成像技术可对飞机、舰船以及空间目标等进行有效的成像。然而,各种目标的运动特点是不同的,且同一目标的机动性可能会随时发生变化,这些因素均会对成像造成不利的影响。如何设计适用于目标多种运动方式的成像几何模型将是对机动目标进行有效三维成像的关键问题,若要开发新的成像体制,在成像几何建模中平台与目标两方面运动必然会引入新的问题。
3)成像算法
成像体制与成像模型可以说是对某一场景进行成像的基础,成像算法则是对这个基础进行解译的钥匙。优质的算法在实际应用中会具有高质量、高效率的成像收益。随着数学理论研究的深入,时频分析处理算法、压缩感知技术、高分辨率成像算法以及各种新兴的人工智能算法也将会成为高质量、高分辨率ISAR三维成像有效的数学工具。
-
![]()
![]()
![]()
表 1 三类ISAR三维成像技术的成像特性、成像能力以及应用条件
Tab. 1 Characteristics, capability and application condition of 3 ISAR imaging teniques
成像技术 成像特性 成像能力 应用条件 单天线ISAR三维成像 通过单根天线生成和差波束、生成二维图像序列、利用目标旋转运动特性等方式实现目标的三维成像 需要较长的观测时间;成像散射点重构误差大;成像应用场景比较有限 比较依赖于目标的运动方式 InISAR三维成像 采用多根天线同时对目标进行观测,通过系统观测到的空间信息实现目标的三维成像 观测时间短;成像效果较好,对目标的三维重构误差小,但无法分离合成散射点;能够对多个应用场景进行成像 各天线之间的距离不能太远且两条基线需保持互相垂直的状态 阵列ISAR三维成像 采用天线阵列对目标进行观测,并利用空间谱估计的方法实现目标的三维成像 观测时间短;成像效果最好;能够对多个应用场景进行成像 需要较多的天线阵元与空间资源  下载: 导出CSV
下载: 导出CSV
表 2 InISAR各成像体制的优势成像目标、体制特点以及目前存在的困难
Tab. 2 Advantage imaging target, characteristics and existed difficulties of all InISAR imaging mechanisms
成像体制 优势成像目标 体制特点 目前存在的困难 机载InISAR 空中目标、舰船 灵活;能够大范围获取舰船目标的态势信息 信杂比与SNR低;基线易发生变化;目标运动参数测量的精度不高;ISAR成像易散焦 星载InISAR 空间目标 能够避开大气窗口对成像质量的影响;能够实现对空间目标更大范围的搜索与观测 成像环境复杂;星载卫星姿态抖动将会对回波信号的幅度、频率以及相位造成一定的影响;高速运动目标的成像问题;外太空非平稳信号的处理问题;基线易发生变化;目标运动参数测量的精度不高 双/多基地InISAR 空中目标、舰船 性能优异;抗干扰性强;隐蔽性高;能对隐身目标进行探测;获取的信息量大 系统配置复杂;需解决三大同步问题;双基地InISAR系统的几何设计问题;多基地InISAR图像融合性能有待提高 太赫兹InISAR 空中目标、舰船 成像分辨率高;抗干扰能力强 技术不够成熟,还需继续深入
下载: 导出CSV
-
[1] AUSHERMAN D, KOZMA A, WALKER J L, et al. Developments in radar imaging[J]. IEEE transactions on aerospace and electronic systems,1984,20(4):363-400.
[2] PRICKETT M J, CHEN C C. Principles of inverse synthetic aperture radar/ISAR/imaging[C]// Electronics and Aerospace Systems Conference. Arlington, September 29-October 1, 1980: 340-345.
[3] CHEN V C, QIAN S. Joint time-frequency transform for radar range-Doppler imaging[J]. IEEE transactions on aerospace & electronics systems,1998,34(2):486-499.
[4] CHEN V C, MICELI W J. Simulation of ISAR imaging of moving targets[J]. IEE proceedings: radar sonar and navigation,2001,148(3):160-166. doi: 10.1049/ip-rsn:20010384
[5] BAI X R, ZHOU F, XING M D, et al. High resolution ISAR imaging of targets with rotating parts[J]. IEEE transactions on aerospace & electronic systems,2011,47(4):2530-2543.
[6] BAO Z, SUN C Y, XING M D. Time-frequency approaches to ISAR imaging of maneuvering targets and their limitations[J]. IEEE transactions on aerospace and electronic systems,2001,37(3):1091-1099. doi: 10.1109/7.953260
[7] TIAN B, LU Z J, LIU Y X, et al. Review on interferometric ISAR 3D imaging: concept, technology and experiment[J]. Signal processing,2018,153(DEC.):164-187.
[8] 张涛, 马长征, 张群, 等. 步进跟踪模式下的单脉冲雷达三维成像技术研究[J]. 电子与信息学报,2001,23(9):912-918. ZHANG T, MA C Z, ZHANG Q, et al. Monopulse radar three dimensional imaging techniques for targets in stepped tracking mode[J]. Journal of electronics and information technology,2001,23(9):912-918. (in Chinese)
[9] 李强, 张守宏, 张焕颖. 单脉冲三维成像中基于ISAR像的角运动参数估计与补偿方法[J]. 雷达科学与技术,2005,3(4):221-231. doi: 10.3969/j.issn.1672-2337.2005.04.007 LI Q, ZHANG S H, ZHANG H Y. Angle movement parameters estimation and compensation based on ISAR profile in mono-pulse 3-D imaging[J]. Radar science and technology,2005,3(4):221-231. (in Chinese) doi: 10.3969/j.issn.1672-2337.2005.04.007
[10] 李军, 全英汇, 邢孟道, 等. 基于和差波束的三维ISAR成像技术[J]. 电波科学学报,2010,25(2):281-286. doi: 10.13443/j.cjors.2010.02.021 LI J, QUAN Y H, XING M D, et al. 3-D ISAR imaging technology based on sum-diff beam[J]. Chinese journal of radio science,2010,25(2):281-286. (in Chinese) doi: 10.13443/j.cjors.2010.02.021
[11] 陈伯孝, 张守宏, 马长征. 单脉冲三维成像及其在末制导雷达中的应用[J]. 雷达科学与技术,2003,1(4):205-209. doi: 10.3969/j.issn.1672-2337.2003.04.004 CHEN B X, ZHANG S H, MA C Z. Monopulse radar 3-D imaging and its application in terminal guidance radar[J]. Radar science and technology,2003,1(4):205-209. (in Chinese) doi: 10.3969/j.issn.1672-2337.2003.04.004
[12] IWAMOTO M, KIRIMOTO T. A novel algorithm for reconstructing three-dimensional target shapes using sequential radar images[C]// IEEE International Geoscience and Remote Sensing Symposium, 2001: 1607-1609.
[13] LI D, XU J D. Method study on three-dimensional image rebuilding based on ISAR sequences[C]// International Conference on Electronics, Communications and Control, 2011: 4375-4377.
[14] 刘烽, 许家栋. 雷达目标三维特征的提取与识别研究[J]. 现代雷达,2005,27(1):18-21. doi: 10.3969/j.issn.1004-7859.2005.01.006 LIU F, XU J D. Research on target identification with ISAR image sequence[J]. Modern radar,2005,27(1):18-21. (in Chinese) doi: 10.3969/j.issn.1004-7859.2005.01.006
[15] MCFADDEN F E. Three-dimensional reconstruction from ISAR sequences[C]// AeroSense 2002: 58-67.
[16] SU F L, LU J, SU Y. A method of 3-D image reconstruction of target based on ISAR image sequences[C]//The 9th European Conference on Synthetic Aperture Radar, 2012: 123-126.
[17] LI G, ZOU J W, XU S Y, et al. A method of 3D reconstruction via ISAR sequences based on scattering centers association for space rigid object[C]// Millimetre Wave & Terahertz Sensors & Technology VII, 2014.
[18] LI G, LIU Y, WU L L, et al. Three-dimensional reconstruction using ISAR sequences[C]. Proceedings of SPIE the international society for optical engineering, 2013: 891908.
[19] LIU L, ZHOU Z B, ZHOU F, et al. A new 3-D geometry reconstruction method of space target utilizing the scatterer energy accumulation of ISAR image sequence[J]. IEEE transactions on geoscience and remote sensing,2020,58(12):8345-8357. doi: 10.1109/TGRS.2020.2986465
[20] ZHANG T Y, DING Z G, LIU Y K, et al. An improved 3-D reconstruction method based on deep neural network[C]// The 14th European Conference on Synthetic Aperture Radar, 2022: 788-793.
[21] ZHANG C, ZHANG X L, ZHANG W. Research on the three-dimensional ISAR imaging for spin target[C]// The 1st Asian and Pacific Conference on Synthetic Aperture Radar Proceedings, 2007: 1-4.
[22] 崔扬. 单站ISAR对外空目标3-D成像技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2007. CUI Y. Study on monostatic ISAR 3-D imaging technique of space object[D]. Harbin: Harbin University of Technology, 2007. (in Chinese)
[23] FORTUNY J. An efficient 3-D near-field ISAR algorithm[J]. IEEE transactions on aerospace & electronic systems,1998,34(4):1261-1270.
[24] WANG Q, XING M D, LU G Y, et al. High-resolution three-dimensional radar imaging for rapidly spinning targets[J]. IEEE transactions on geoscience and remote sensing,2008,46(1):22-30. doi: 10.1109/TGRS.2007.909086
[25] ZHANG L, XING M D, QIU C W, et al. Two-dimensional spectrum matched filter banks for high-speed spinning-target three-dimensional ISAR imaging[J]. IEEE geoscience and remote sensing letters,2009,6(3):368-372. doi: 10.1109/LGRS.2009.2013487
[26] YU N, ZHOU F, BAI X R, et al. A method for 3-D ISAR imaging of space debris[J]. IEEE transactions on aerospace and electronic systems,2019,55(2):864-876. doi: 10.1109/TAES.2018.2866033
[27] 李军, 刘亚波, 邢孟道, 等. 基于窄带步进频率的旋转目标三维ISAR成像[J]. 电子与信息学报,2010,32(7):1674-1678. LI J, LIU Y B, XING M D, et al. Three-dimension ISAR imaging of spinning targets based on narrow-band stepped-frequency[J]. Journal of electronics & information technology,2010,32(7):1674-1678. (in Chinese)
[28] XU X J, NARAYANAN R M. Three-dimensional interferometric ISAR imaging for target scattering diagnosis and modeling[J]. IEEE transactions on image processing,2001,10(7):1094-1102. doi: 10.1109/83.931103
[29] WANG G Y, XIA X G, CHEN V C. Three-dimensional ISAR imaging of maneuvering targets using three receivers[J]. IEEE transactions on image processing,2001,10(3):436-447. doi: 10.1109/83.908519
[30] 张群, 马长征, 张涛, 等. 干涉式逆合成孔径雷达三维成像技术研究[J]. 电子与信息学报,2001,23(9):890-898. ZHANG Q, MA C Z, ZHANG T, et al. Research on 3-D imaging technique for interferometric inverse synthetic aperture radar[J]. Journal of electronics and information technology,2001,23(9):890-898. (in Chinese)
[31] MARTORELLA M, STAGLIANO D, SALVETTI F, et al. 3D interferometric ISAR imaging of noncooperative targets[J]. IEEE transactions on aerospace and electronic systems,2014,50(4):3102-3114. doi: 10.1109/TAES.2014.130210
[32] MARTORELLA M, SALVETTI F, STAGLIANO D. 3D target reconstruction by means of 2D-ISAR imaging and interferometry[C]// IEEE Radar Conference, 2013: 1-6.
[33] LIU C L, GAO X Z, JIANG W D, et al. Interferometric ISAR three-dimensional imaging using one antenna[J]. Progress in electromagnetics research M,2011,21:33-45. doi: 10.2528/PIERM11070803
[34] 李丽亚. 宽带雷达目标识别技术研究[D]. 西安: 西安电子科技大学, 2009. LI L Y. Study on wideband radar target recognition[D]. Xi’an: Xidian University, 2009. (in Chinese)
[35] 沈楠. InISAR三维成像的基线构型研究[D]. 合肥: 中国科学技术大学, 2010. SHEN N. Research on baseline configuration of interferometric inverse synthetic aperture radar imaging[D]. Hefei: University of Science and Technology of China, 2010. (in Chinese)
[36] 高昭昭, 邢孟道, 张守宏. 基于InISAR技术的三维成像[J]. 西安电子科技大学学报,2008,35(5):883-888. GAO Z Z, XING M D, ZHANG S H. 3D image reconstruction using the InISAR technique[J]. Journal of Xidian University,2008,35(5):883-888. (in Chinese)
[37] RONG J J, WANG Y, HAN T. Interferometric ISAR imaging of maneuvering targets with arbitrary three-antenna configuration[J]. IEEE transactions on geoscience and remote sensing,2020,58(2):1102-1119. doi: 10.1109/TGRS.2019.2943613
[38] WU W Z, HU P J, XU S Y, et al. Image registration for InISAR based on joint translational motion compensation[J]. IET radar sonar & navigation,2017,11(10):1597-1603.
[39] ZHANG Q, YEO T S, DU G, et al. Estimation of three-dimensional motion parameters in interferometric ISAR imaging[J]. IEEE transactions on geoscience and remote sensing,2004,42(2):292-300. doi: 10.1109/TGRS.2003.815669
[40] 张冬晨. InISAR三维成像的关键技术研究[D]. 合肥: 中国科学技术大学, 2009. ZHANG D C. Research on the key techniques of interferometric inverse synthetic aperture radar imaging[D]. Hefei: University of Science and Technology of China, 2009. (in Chinese)
[41] 刘承兰, 高勋章, 贺峰, 等. 一种基于相位校正的InISAR图像配准新方法[J]. 国防科技大学学报,2011,33(5):116-122. doi: 10.3969/j.issn.1001-2486.2011.05.022 LIU C L, GAO X Z, HE F, et al. A novel method for image registration in InISAR imaging based on phase correction[J]. Journal of National University of Defense Technology,2011,33(5):116-122. (in Chinese) doi: 10.3969/j.issn.1001-2486.2011.05.022
[42] TIAN B, LI N, LIU Y, et al. A novel image registration method for InISAR imaging system[C]// Science and Technology on Automatic Target Recognition Laboratory, 2014: 92520U. 1-92520U. 8.
[43] TIAN B, SHI S, LIU Y, et al. Image registration of interferometric inverse synthetic aperture radar imaging system based on joint respective window sampling and modified motion compensation[J]. Journal of applied remote sensing,2015,9(1):095097. doi: 10.1117/1.JRS.9.095097
[44] 周子铂, 蒋李兵, 王壮. 一种基于波程差补偿的InISAR图像配准方法[J]. 雷达学报,2018,7(6):758-769. doi: 10.12000/JR18070 ZHOU Z B, JIANG L B, WANG Z. Image registration based on wave path difference compensation for InISAR[J]. Journal of radars,2018,7(6):758-769. (in Chinese) doi: 10.12000/JR18070
[45] 宋建伟. 干涉三维ISAR成像方法[D]. 西安: 西安电子科技大学, 2019. SONG J W. The method of interferometric three-dimensional ISAR imaging[D]. Xi’an: Xidian University, 2019. (in Chinese)
[46] KANG B, LEE K, KIM K. Image registration for 3-D interferometric-ISAR imaging through joint-channel phase difference functions[J]. IEEE transactions on aerospace and electronic systems,2020,57(1):22-38.
[47] SHAO S, LIU H W, ZHANG L, et al. Three-dimensional InISAR imaging of maneuvering targets with joint motion compensation and azimuth scaling under single baseline configuration[J]. IEEE geoscience and remote sensing letters,2022,19:4502605.
[48] LIU Y B, SONG M C, WU K, et al. High-quality 3-D InISAR imaging of maneuvering target based on a combined processing approach[J]. IEEE geoscience and remote sensing letters,2013,10(5):1036-1040. doi: 10.1109/LGRS.2012.2227935
[49] 张凯, 金林, 侯颖妮. 基于联合平动补偿的InISAR成像方法研究[J]. 现代雷达,2019,41(4):43-47. doi: 10.16592/j.cnki.1004-7859.2019.04.010 ZHANG K, JIN L, HOU Y N. A study on InISAR imaging based on joint translational compensation[J]. Modern radar,2019,41(4):43-47. (in Chinese) doi: 10.16592/j.cnki.1004-7859.2019.04.010
[50] 刘承兰. 干涉逆合成孔径雷达(InISAR)三维成像技术研究[D]. 长沙: 国防科学技术大学, 2014. LIU C L. Research on interferometric inverse synthetic aperture radar three-dimensional imaging [D]. Changsha: National University of Defense Technology, 2014. (in Chinese)
[51] LYU Q, SU T, ZHENG J B, et al. Three-dimensional interferometric inverse synthetic aperture radar imaging of maneuvering target based on the joint cross modified Wigner-Ville distribution[J]. Journal of applied remote sensing,2016,10(1):15007. doi: 10.1117/1.JRS.10.015007
[52] WANG Y, CHEN X F. 3-D InISAR imaging of the ship target based on joint cross S-method algorithm[J]. IEEE geoscience and remote sensing letters,2019,16(7):1080-1084. doi: 10.1109/LGRS.2019.2893260
[53] TIAN B, ZOU J W, XU S Y, et al. Squint model interferometric ISAR imaging based on respective reference range selection and squint iteration improvement[J]. Radar sonar & navigation IET,2015,9(9):1366-1375.
[54] LIU C L, HE F, GAO X Z, et al. Squint-mode InISAR imaging based on nonlinear least square and coordinates transform[J]. Science China technological sciences,2011,54(12):3332-3340. doi: 10.1007/s11431-011-4515-9
[55] TIAN B, LIU Y, TANG D, et al. Interferometric ISAR imaging for space moving targets on a squint model using two antennas[J]. Journal of electromagnetic waves & applications,2014,28(17):2135-2152.
[56] FONTANA A, BERENS P, STAGLIANO D, et al. 3D InISAR target reconstruction using airborne PAMIR data[C]// Proceedings of EUSAR 2016: the 11th European Conference on Synthetic Aperture Radar, 2016: 1-5.
[57] FONTANA A, BERENS P, STAGLIANO D, et al. 3D ISAR/SAR imaging using multichannel real data[C]// 2016 IEEE Radar Conference, 2016: 1-4.
[58] GIUSTI E, GHIO S, MARTORELLA M. Drone-based 3D interferometric ISAR imaging[C]// 2021 IEEE Radar Conference, 2021: 1-6.
[59] 曹星慧. 对空间目标的星载干涉ISAR三维成像技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2011. CAO X H. Research on 3D imaging techniques of space target via spaceborne interferometric ISAR[D]. Harbin: Harbin University of Technology, 2011. (in Chinese)
[60] MA C Z, YEO T S, GUO Q, et al. Bistatic ISAR imaging incorporating interferometric 3-D imaging technique[J]. IEEE transactions on geoscience & remote sensing,2012,50(10):3859-3867.
[61] STAGLIANÒ D, MARTORELLA M, CASALINI E. Interferometric bistatic ISAR processing for 3D target reconstruction[C]// The 11th European Radar Conference, 2014: 161-164.
[62] STAGLIANÒ D, GIUSTI E, LISCHI S, et al. Bistatic three-dimensional interferometric ISAR[J]. IET radar, sonar & navigation,2016,10(1):63-75.
[63] WANG Y, LI X L. Three-dimensional interferometric ISAR imaging for the ship target under the bi-static configuration[J]. IEEE journal of selected topics in applied earth observations and remote sensing,2016,9(4):1505-1520. doi: 10.1109/JSTARS.2015.2513774
[64] JI B, ZHAO B, WANG Y, et al. Bi-static high resolution imaging for ship targets with sparse apertures and its application in InISAR[J]. Remote sensing letters,2020,11(6):545-554. doi: 10.1080/2150704X.2020.1736726
[65] ZHAO L Z, GAO M G, MARTORELLA M, et al. Bistatic three-dimensional interferometric ISAR image reconstruction[J]. IEEE transactions on aerospace & electronic systems,2015,51(2):951-961.
[66] SALVETTI F, STAGLIANO D, GIUSTI E, et al. Multistatic 3D ISAR image reconstruction[C]// 2015 IEEE Radar Conference, 2015: 640-645.
[67] SALVETTI F, MARTORELLA M, GIUSTI E, et al. Multiview three-dimensional interferometric inverse synthetic aperture radar[J]. IEEE transactions on aerospace and electronic systems,2019,55(2):718-733. doi: 10.1109/TAES.2018.2864469
[68] 蒋彦雯, 邓彬, 王宏强, 等. 基于双频联合处理的太赫兹InISAR成像方法[J]. 雷达学报,2018,7(1):139-146. doi: 10.12000/JR17109 JIANG Y W, DENG B, WANG H Q, et al. Improved Terahertz InISAR imaging method based on joint processing of dual-frequency data[J]. Journal of radars,2018,7(1):139-146. (in Chinese) doi: 10.12000/JR17109
[69] MA C Z, YEO T S, ZHANG Q, et al. Three-dimensional ISAR imaging based on antenna array[J]. IEEE transactions on geoscience and remote sensing,2008,46(2):504-515. doi: 10.1109/TGRS.2007.909946
[70] 年毅恒. 非均匀线阵ISAR三维成像研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. NIAN Y H. Research on non-uniform liner array three-dimensional ISAR imaging[D]. Harbin: Harbin University of Technology, 2018. (in Chinese)
[71] MA C Z, YEO T S, TAN H S, et al. Three-dimensional ISAR imaging using a two-dimensional sparse antenna array[J]. IEEE geoscience and remote sensing letters,2008,5(3):378-382. doi: 10.1109/LGRS.2008.916071
[72] MA C Z, YEO T S, TAN C S, et al. Sparse array 3-D ISAR imaging based on maximum likelihood estimation and CLEAN technique[J]. IEEE transactions on image processing,2010,19(8):2127-2142. doi: 10.1109/TIP.2010.2045711
[73] JIAO Z K, DING C B, CHEN L Y, et al. Three-dimensional imaging method for array ISAR based on sparse Bayesian inference[J]. Sensors,2018,18(10):3563. doi: 10.3390/s18103563
[74] ZHU Y T, SU Y. A type of m~2-transmitter n~2-receiver MIMO radar array and 3D imaging theory[J]. Science China information sciences,2011,54(10):2147-2157. doi: 10.1007/s11432-011-4400-y
[75] WANG Y, LI X L. 3-D imaging based on combination of the ISAR technique and a MIMO radar system[J]. IEEE transactions on geoscience and remote sensing,2018,56(10):1-22. doi: 10.1109/TGRS.2018.2871305
[76] MA C Z, YEO T S, TAN C S, et al. Three-dimensional imaging using collocated MIMO radar and ISAR technique[J]. IEEE transactions on geoscience and remote sensing,2012,50(8):3189-3201. doi: 10.1109/TGRS.2011.2178607
[77] 郑通, 蒋李兵, 王壮. 基于多快拍图像联合的MIMO雷达三维成像方法[J]. 雷达学报,2020,9(4):739-752. doi: 10.12000/JR19069 ZHENG T, JIANG L B, WANG Z. Three-dimensional multiple-input multiple-output radar imaging method based on integration of multi-snapshot images[J]. Journal of radars,2020,9(4):739-752. (in Chinese) doi: 10.12000/JR19069
[78] 任双桥, 刘永祥, 黎湘, 等. 基于多姿态角下一维距离像的雷达目标三维成像[J]. 电子学报,2005,33(6):1088-1090. doi: 10.3321/j.issn:0372-2112.2005.06.032 REN S Q, LIU Y X, LI X, et al. Radar target 3-D imaging based on multi-aspect range profiles[J]. Acta electronica sinica,2005,33(6):1088-1090. (in Chinese) doi: 10.3321/j.issn:0372-2112.2005.06.032
[79] TSUKUNE H. Recovering 3-D velocity vector field using optical flow observed from three views[J]. Transactions of the society of instrument & control engineers,2009,25(11):1210-1217.
[80] TOMASI C, KANADE T. Shape and motion from image streams: a factorization method[J]. Proceedings of the national academy of sciences,1993,90(21):9795-9802. doi: 10.1073/pnas.90.21.9795
[81] KINGMA D P, BA J. Adam: a method for stochastic optimization[C]// The 3rd International Conference for Learning Representations, 2014.
[82] MAO X H, ZHU D Y, ZHU Z D. Polar format algorithm wavefront curvature compensation under arbitrary radar flight path[J]. IEEE geoscience & remote sensing letters,2012,9(3):526-530.
[83] ZHOU X Y, WANG Y, LU X F. Approach for ISAR imaging of near-field targets based on coordinate conversion and image interpolation[J]. Journal of systems engineering and electronics,2021,32(2):425-436. doi: 10.23919/JSEE.2021.000036
[84] SOUMEKH M. Automatic aircraft landing using interferometric inverse synthetic aperture radar imaging[J]. IEEE transactions on image processing,1996,5(9):1335-1345. doi: 10.1109/83.535845
[85] 张弛. 高分辨ISAR成像及三维成像方法研究[D]. 成都: 电子科技大学, 2009. ZHANG C. Research on high-resolution ISAR imaging and 3D imaging methods[D]. Chengdu: University of Electronic Science and Technology of China, 2009. (in Chinese)
[86] ZHOU P, ZHANG X, DAI Y S, et al. Time window selection algorithm for ISAR ship imaging based on instantaneous Doppler frequency estimations of multiple scatterers[J]. IEEE journal of selected topics in applied earth observations and remote sensing,2019,12(10):3799-3812. doi: 10.1109/JSTARS.2019.2943349
[87] LI N, SHEN Q Y, WANG L, et al. Optimal time selection for ISAR imaging of ship targets based on time-frequency analysis of multiple scatterers[J]. IEEE geoscience and remote sensing letters,2021,19:4017505.
[88] CAO R, WANG Y, YEH C M, et al. A novel optimal time window determination approach for ISAR imaging of ship target[J]. IEEE journal of selected topics in applied earth observations and remote sensing,2022,15:3475-3503. doi: 10.1109/JSTARS.2022.3161204
[89] MARTORELLA M, CATALDO D, BRISKEN S. Bistatically equivalent monostatic approximation for bistatic ISAR[C]// IEEE Radar Conference, 2013: 1-5.
[90] DORP P, OTTEN M, VERZEILBERG J. Coherent multistatic ISAR imaging[C]// IET International Conference on Radar Systems, 2013: 1-6.
[91] 王宏强, 邓彬, 秦玉亮. 太赫兹雷达技术[J]. 雷达学报,2018,7(1):1-21. doi: 10.12000/JR17107 WANG H Q, DENG B, QIN Y L. Review of Terahertz radar technology[J]. Journal of radars,2018,7(1):1-21. (in Chinese) doi: 10.12000/JR17107
[92] JIANG Y W, DENG B, WANG H Q, et al. An effective nonlinear phase compensation method for FMCW Terahertz radar[J]. IEEE photonics technology letters,2016,28(15):1684-1687. doi: 10.1109/LPT.2016.2558462
[93] LI S Y, WANG S G, AN Q, et al. Cylindrical MIMO array-based near-field microwave imaging[J]. IEEE transactions on antennas and propagation,2020,69(1):612-617.
[94] 谷文堃, 王党卫, 马晓岩, 等. 分布式MIMO-ISAR子图像融合方法[J]. 雷达学报,2017,6(1):90-97. GU W K, WANG D W, MA X Y, et al. Distributed MIMO-ISAR sub-image fusion method[J]. Journal of radars,2017,6(1):90-97. (in Chinese)
[95] ZHU Y T, SU Y, YU W X. An ISAR imaging method based on MIMO technique[J]. IEEE transactions on geoscience & remote sensing,2010,48(8):3290-3299.
[96] FORRESTER N T. Surface reconstruction from interferometric ISAR data[D]. Boston: Massachusetts Institute of Technology, 2014.
-
期刊类型引用(3)
1. 黄猛,李少猛,王玉菊,王青山,代维凯,张思维,李典. 基于电磁仿真和机器学习的快速目标成像模型. 电波科学学报. 2025(01): 58-62 .  本站查看
本站查看
2. 商城,徐志明,张杨,张楷煜,吴其华,朱义奇,艾小锋. 空中目标动态电磁散射数据仿真系统设计与实现. 现代防御技术. 2024(02): 163-171 . 百度学术
3. 王兆成,宿博瑜,程雨佳,文志颜,张宝林,于宇. 合成孔径激光雷达成像研究进展综述. 河北工业大学学报. 2024(05): 1-12+86 . 百度学术
其他类型引用(6)







计量
- 文章访问数: 453
- HTML全文浏览量: 528
- PDF下载量: 245
- 被引次数: 9
